সয়ুজ মহাকাশযান ফ্লাইট। সয়ুজ মহাকাশযান
সয়ুজ মহাকাশযান
"সয়ুজ" পৃথিবীর চারপাশে কক্ষপথে ফ্লাইটের জন্য সোভিয়েত মহাকাশযানের একটি সিরিজের নাম; তাদের উন্নয়নের জন্য একটি প্রোগ্রাম (1962 সাল থেকে) এবং চালু হয় (1967 সাল থেকে; মানবহীন পরিবর্তন - 1966 সাল থেকে)। সয়ুজ মহাকাশযানকে পৃথিবীর কাছাকাছি মহাকাশে বিস্তৃত কাজের সমাধান করার জন্য ডিজাইন করা হয়েছে: স্বায়ত্তশাসিত নেভিগেশন, নিয়ন্ত্রণ, কৌশল, মিলন এবং ডকিংয়ের প্রক্রিয়াগুলি পরীক্ষা করা; মানবদেহে দীর্ঘমেয়াদী মহাকাশ ফ্লাইটের অবস্থার প্রভাব অধ্যয়ন করা; জাতীয় অর্থনীতির স্বার্থে পৃথিবী অন্বেষণের জন্য মনুষ্যবাহী মহাকাশযান ব্যবহার করার নীতিগুলি পরীক্ষা করা এবং অরবিটাল স্টেশনগুলির সাথে যোগাযোগের জন্য পরিবহন ক্রিয়াকলাপ সম্পাদন করা; মহাকাশে বৈজ্ঞানিক ও প্রযুক্তিগত পরীক্ষা-নিরীক্ষা করা এবং অন্যান্য।
একটি সম্পূর্ণ জ্বালানী এবং সজ্জিত জাহাজের ওজন 6.38 টন (প্রাথমিক সংস্করণ) থেকে 6.8 টন, ক্রু আকার 2 জন (3 জন - 1971 সালের আগে পরিবর্তনে), সর্বাধিক অর্জিত স্বায়ত্তশাসিত ফ্লাইট সময়কাল 17.7 দিন (একজন ক্রু সহ) 2 জনের মধ্যে ), দৈর্ঘ্য (হুল) 6.98-7.13 মিটার, ব্যাস 2.72 মিটার, সোলার প্যানেলের স্প্যান 8.37 মিটার, চাপযুক্ত হুল বরাবর দুটি আবাসিক বগির আয়তন 10.45 m3, ফাঁকা স্থান - 6.5 m3। Soyuz মহাকাশযান তিনটি প্রধান বগি নিয়ে গঠিত, যা যান্ত্রিকভাবে একে অপরের সাথে সংযুক্ত এবং পাইরোটেকনিক ডিভাইস ব্যবহার করে পৃথক করা হয়। জাহাজের মধ্যে রয়েছে: ফ্লাইটে এবং অবতরণের সময় একটি অভিযোজন এবং গতি নিয়ন্ত্রণ ব্যবস্থা; মুরিং এবং মনোভাব নিয়ন্ত্রণ ব্যবস্থা; অনুমান-সংশোধনী প্রপালশন সিস্টেম; রেডিও যোগাযোগ, পাওয়ার সাপ্লাই, ডকিং, রেডিও গাইডেন্স এবং মিলন এবং মুরিং সিস্টেম; ল্যান্ডিং এবং নরম ল্যান্ডিং সিস্টেম; জীবন সমর্থনকারী সিস্টেম; অন-বোর্ড সরঞ্জাম এবং সরঞ্জামের জন্য নিয়ন্ত্রণ ব্যবস্থা।
ডিসেন্ট ভেহিকেল - ভর 2.8 টন, ব্যাস 2.2 মিটার, দৈর্ঘ্য 2.16 মিটার, বাসযোগ্য বগির অভ্যন্তরীণ কনট্যুর বরাবর আয়তন 3.85 m3 - নিয়ন্ত্রণ করার সময় সয়ুজকে কক্ষপথে ইনজেক্ট করার ক্ষেত্রে ক্রুদের মিটমাট করার জন্য ব্যবহার করা হয় অরবিটাল ফ্লাইটে জাহাজ, বায়ুমণ্ডলে অবতরণের সময়, প্যারাশুটিং, অবতরণ। অ্যালুমিনিয়াম খাদ দিয়ে তৈরি ডিসেন্ট মডিউলের হারমেটিক বডির একটি শঙ্কু আকৃতি রয়েছে, নীচের এবং উপরের অংশে একটি গোলায় পরিণত হয়। ডিসেন্ট গাড়ির অভ্যন্তরে সরঞ্জাম এবং সরঞ্জাম স্থাপনের সুবিধার জন্য, শরীরের সামনের অংশটি অপসারণযোগ্য। শরীরের বাইরের অংশে তাপ নিরোধক রয়েছে, কাঠামোগতভাবে সামনের স্ক্রিন (প্যারাসুট বিভাগে শট), পাশে এবং নীচের তাপ সুরক্ষা রয়েছে; গাড়ির আকৃতি এবং ভর কেন্দ্রের অবস্থান বায়ুগত গুণমান সহ একটি নিয়ন্ত্রিত বংশধর নিশ্চিত করে ( ~0.25)। শরীরের উপরের অংশে বাসযোগ্য অরবিটাল বগির সাথে যোগাযোগের জন্য এবং অবতরণ করার পরে ক্রুদের ডিসেন্ট ভেহিকেল থেকে বেরিয়ে যাওয়ার জন্য একটি হ্যাচ (স্বচ্ছ ব্যাস 0.6 মিটার) রয়েছে। ডিসেন্ট ভেহিকেলটি তিনটি জানালা দিয়ে সজ্জিত, যার মধ্যে দুটিতে তিন-কাচের নকশা এবং একটিতে দুই-কাচের নকশা রয়েছে (যে স্থানে ওরিয়েন্টিং দৃষ্টি ইনস্টল করা আছে)। শরীরে দুটি সিল করা প্যারাসুট পাত্র রয়েছে, যা আলাদা করা যায় এমন ঢাকনা দিয়ে বন্ধ করা হয়েছে। হুলের সামনের অংশে 4টি নরম ল্যান্ডিং ইঞ্জিন ইনস্টল করা আছে। মূল প্যারাসুট সিস্টেমে অবতরণ গতি, নরম অবতরণ ইঞ্জিনগুলির আবেগকে বিবেচনা করে, 6 মি/সেকেন্ডের বেশি নয়। ডিসেন্ট মডিউলটি বছরের যে কোন সময় মাটিতে অবতরণ করার জন্য ডিজাইন করা হয়েছে। বিভিন্ন ধরনের(পাথুরে সহ) এবং খোলা জলাধার। জলের দেহে অবতরণ করার সময়, ক্রুরা গাড়িতে 5 দিন পর্যন্ত ভেসে থাকতে পারে।
ডিসেন্ট মডিউলটিতে মহাকাশচারীদের কনসোল, মহাকাশযান নিয়ন্ত্রণ নব, জাহাজের প্রধান এবং সহায়ক সিস্টেমের যন্ত্র এবং সরঞ্জাম, বৈজ্ঞানিক সরঞ্জাম ফেরত দেওয়ার পাত্র, রিজার্ভ স্টক (খাদ্য, সরঞ্জাম, ওষুধ ইত্যাদি) রয়েছে, যা জীবন নিশ্চিত করে। অবতরণের পরে 5 দিনের জন্য ক্রু, মানে অবতরণের সময় এবং অবতরণের পরে রেডিও যোগাযোগ এবং দিকনির্দেশনা ইত্যাদি। ভিতরে, ডিসেন্ট গাড়ির শরীর এবং সরঞ্জামগুলি আলংকারিক ক্ল্যাডিংয়ের সাথে মিলিত তাপ নিরোধক দ্বারা আচ্ছাদিত। সয়ুজকে কক্ষপথে চালু করার সময়, পৃথিবীতে নামা এবং ডকিং এবং আনডকিং অপারেশনগুলি সম্পাদন করার সময়, ক্রু সদস্যরা স্পেসসুটে থাকে (1971 সালের পরে প্রবর্তিত)। ASTP প্রোগ্রামের অধীনে ফ্লাইট নিশ্চিত করার জন্য, ডিসেন্ট ভেহিকেলটি সামঞ্জস্যপূর্ণ (একই ফ্রিকোয়েন্সিতে অপারেটিং) রেডিও স্টেশন এবং বাহ্যিক আলোগুলির জন্য একটি নিয়ন্ত্রণ প্যানেল দিয়ে সজ্জিত ছিল এবং রঙিন টেলিভিশন চিত্র প্রেরণের জন্য বিশেষ বাতি ইনস্টল করা হয়েছিল।
বাসযোগ্য অরবিটাল (গৃহস্থালী) বগি - ওজন 1.2-1.3 টন, ব্যাস 2.2 মিটার, দৈর্ঘ্য (ডকিং ইউনিট সহ) 3.44 মিটার, সিল করা আবাসনের অভ্যন্তরীণ রূপের সাথে আয়তন 6.6 m3, বিনামূল্যের আয়তন 4 m3 - বহন করার সময় একটি কাজের বগি হিসাবে ব্যবহৃত হয় আউট বৈজ্ঞানিক পরীক্ষা-নিরীক্ষা, ক্রুকে বিশ্রাম দেওয়ার জন্য, এটিকে অন্য মহাকাশযানে স্থানান্তর করার জন্য এবং মহাকাশে প্রবেশের জন্য (এয়ারলক হিসাবে কাজ করে)। অরবিটাল কম্পার্টমেন্টের সিল করা বডি, ম্যাগনেসিয়াম খাদ দিয়ে তৈরি, 2.2 মিটার ব্যাস সহ দুটি গোলার্ধীয় খোলস নিয়ে গঠিত, 0.3 মিটার উঁচু একটি নলাকার সন্নিবেশ দ্বারা সংযুক্ত। বগিটিতে দুটি দেখার জানালা রয়েছে। শরীরে দুটি হ্যাচ রয়েছে, যার একটি অরবিটাল বগিকে ডিসেন্ট মডিউলের সাথে সংযুক্ত করে এবং অন্যটি (পরিষ্কার ব্যাস 0.64 মিটার) ক্রুদের উৎক্ষেপণ অবস্থানে মহাকাশযানে চড়ার জন্য এবং মহাকাশে যাওয়ার জন্য ব্যবহৃত হয়। কম্পার্টমেন্টে জাহাজের প্রধান এবং সহায়ক সিস্টেমের কন্ট্রোল প্যানেল, যন্ত্র এবং সমাবেশ, গৃহস্থালীর যন্ত্রপাতি এবং বৈজ্ঞানিক যন্ত্রপাতি রয়েছে। পরিবহণ জাহাজ হিসাবে তাদের ব্যবহারের ক্ষেত্রে মহাকাশযানের স্বয়ংক্রিয় এবং মানবিক পরিবর্তনগুলির ডকিং পরীক্ষা এবং নিশ্চিত করার সময়, অরবিটাল কম্পার্টমেন্টের উপরের অংশে একটি ডকিং ইউনিট ইনস্টল করা হয়, যা নিম্নলিখিত ফাংশনগুলি সম্পাদন করে: প্রভাবের শোষণ (স্যাঁতসেঁতে) জাহাজের শক্তি; প্রাথমিক সংযোগ; জাহাজ সমতলকরণ এবং শক্ত করা; জাহাজের কাঠামোর অনমনীয় সংযোগ (Soyuz-10 থেকে শুরু করে - তাদের মধ্যে একটি hermetically সিল করা জয়েন্ট তৈরির সাথে); মহাকাশযানের আনডকিং এবং বিচ্ছেদ। সোয়ুজ মহাকাশযানে তিন ধরনের ডকিং ডিভাইস ব্যবহার করা হয়েছিল:
প্রথমটি, "পিন-শঙ্কু" স্কিম অনুসারে তৈরি; দ্বিতীয়টি, এই স্কিম অনুসারে তৈরি করা হয়েছে, তবে একটি জাহাজ থেকে অন্য জাহাজে ক্রুদের স্থানান্তর নিশ্চিত করার জন্য ডক করা জাহাজগুলির মধ্যে একটি হারমেটিকভাবে সিল করা জয়েন্ট তৈরির সাথে;
(ASTP প্রোগ্রামের অধীনে পরীক্ষায় তৃতীয়), যা একটি নতুন, প্রযুক্তিগতভাবে আরও উন্নত ডিভাইস - অ্যান্ড্রোজিনাস পেরিফেরাল ডকিং ইউনিট (এপিএএস)। কাঠামোগতভাবে, প্রথম দুটি ধরণের ডকিং ডিভাইস দুটি অংশ নিয়ে গঠিত: একটি মহাকাশযানের একটিতে একটি সক্রিয় ডকিং ইউনিট ইনস্টল করা হয়েছে এবং সমস্ত ডকিং ক্রিয়াকলাপ পরিচালনা করার জন্য একটি পদ্ধতিতে সজ্জিত এবং অন্য মহাকাশযানে একটি প্যাসিভ ডকিং ইউনিট ইনস্টল করা হয়েছে।
2.7-2.8 টন ওজনের ইন্সট্রুমেন্টেশন এবং অ্যাসেম্বলি কম্পার্টমেন্টটি মূল মহাকাশযান সিস্টেমের যন্ত্রপাতি এবং সরঞ্জামগুলিকে মিটমাট করার জন্য ডিজাইন করা হয়েছে যা অরবিটাল ফ্লাইট নিশ্চিত করে। এটি রূপান্তর, যন্ত্র এবং সামগ্রিক বিভাগ নিয়ে গঠিত। ইনস্ট্রুমেন্ট সেকশনের সাথে ডিসেন্ট ভেহিকেল সংযোগকারী আকৃতির কাঠামোর আকারে তৈরি ট্রানজিশন বিভাগে, প্রতিটিতে 100 এন থ্রাস্ট সহ 10টি মুরিং এবং ওরিয়েন্টেশন ইঞ্জিন, জ্বালানী ট্যাঙ্ক এবং একটি একক-কম্পোনেন্ট জ্বালানি (হাইড্রোজেন পারক্সাইড) সরবরাহ ব্যবস্থা রয়েছে। ইনস্টল করা সিল করা ইন্সট্রুমেন্ট সেকশনটির আয়তন 2.2 m3, 2.1 মিটার ব্যাস সহ একটি সিলিন্ডারের আকার, দুটি অপসারণযোগ্য কভার সহ 0.5 মিটার উচ্চতা রয়েছে। ইন্সট্রুমেন্ট সেকশনে ওরিয়েন্টেশন এবং মোশন কন্ট্রোল সিস্টেম, জাহাজের সরঞ্জাম ও সরঞ্জামের অনবোর্ড কমপ্লেক্সের নিয়ন্ত্রণ, পৃথিবীর সাথে রেডিও যোগাযোগ এবং একটি সফ্টওয়্যার-টাইম ডিভাইস, টেলিমেট্রি এবং একটি ইউনিফাইড পাওয়ার সাপ্লাই এর জন্য যন্ত্র রয়েছে। সামগ্রিক বিভাগের শরীরটি একটি নলাকার শেলের আকারে তৈরি করা হয়, একটি শঙ্কুযুক্ত শেলে পরিণত হয় এবং একটি লঞ্চ গাড়িতে জাহাজটি ইনস্টল করার উদ্দেশ্যে একটি বেস ফ্রেমের সাথে শেষ হয়। সামগ্রিক বিভাগের বাইরে তাপ নিয়ন্ত্রণ ব্যবস্থার একটি বড় রেডিয়েটর-ইমিটার, 4টি মুরিং এবং ওরিয়েন্টেশন ইঞ্জিন, 8টি ওরিয়েন্টেশন ইঞ্জিন রয়েছে। সমাবেশ বিভাগে KTDU-35 প্রক্সিমিটি-কারেক্টিং প্রপালশন সিস্টেম রয়েছে, যার মধ্যে প্রধান এবং ব্যাকআপ ইঞ্জিন রয়েছে যার থ্রাস্ট 4.1 kN, ফুয়েল ট্যাঙ্ক এবং একটি দুই-কম্পোনেন্ট জ্বালানি সরবরাহ ব্যবস্থা রয়েছে। বেস ফ্রেমের কাছে রেডিও কমিউনিকেশন এবং টেলিমেট্রি অ্যান্টেনা, অ্যাটিটিউড কন্ট্রোল সিস্টেমের আয়ন সেন্সর এবং জাহাজের ইউনিফাইড পাওয়ার সাপ্লাই সিস্টেমের ব্যাটারির কিছু অংশ ইনস্টল করা আছে। সৌর ব্যাটারি (সেগুলি স্যালিউট অরবিটাল স্টেশনগুলির পরিষেবা দেওয়ার জন্য পরিবহন জাহাজ হিসাবে ব্যবহৃত জাহাজগুলিতে ইনস্টল করা হয় না) প্রতিটি 3-4 উইংসের দুটি "উইং" আকারে তৈরি করা হয়। ব্যাটারির শেষ ফ্ল্যাপগুলিতে রেডিও যোগাযোগ, টেলিমেট্রি অ্যান্টেনা এবং রঙিন অনবোর্ড ওরিয়েন্টেশন লাইট (ASTP প্রোগ্রামের অধীনে পরীক্ষায়) রয়েছে।
মহাকাশযানের সমস্ত বগি বাইরে থেকে সবুজ রঙের স্ক্রিন-ভ্যাকুয়াম তাপ নিরোধক দ্বারা আবৃত। যখন কক্ষপথে ঢোকানো হয় - ফ্লাইট পর্বের সময় ঘন স্তরবায়ুমণ্ডল, জরুরী রেসকিউ সিস্টেমের জন্য একটি প্রপালশন সিস্টেম দিয়ে সজ্জিত একটি জেটিসোনেবল ফেয়ারিং দ্বারা জাহাজটি বন্ধ করা হয়।
 জাহাজের অভিযোজন এবং গতি নিয়ন্ত্রণ ব্যবস্থা স্বয়ংক্রিয় এবং ম্যানুয়াল নিয়ন্ত্রণ মোডে কাজ করতে পারে। অন-বোর্ড সরঞ্জামগুলি সৌর, সেইসাথে স্বায়ত্তশাসিত রাসায়নিক ব্যাটারি এবং বাফার ব্যাটারি সহ একটি কেন্দ্রীভূত পাওয়ার সাপ্লাই সিস্টেম থেকে শক্তি গ্রহণ করে। মহাকাশযানটি অরবিটাল স্টেশনের সাথে ডক করার পরে, সৌর প্যানেলগুলি সামগ্রিক বিদ্যুৎ সরবরাহ ব্যবস্থায় ব্যবহার করা যেতে পারে।
জাহাজের অভিযোজন এবং গতি নিয়ন্ত্রণ ব্যবস্থা স্বয়ংক্রিয় এবং ম্যানুয়াল নিয়ন্ত্রণ মোডে কাজ করতে পারে। অন-বোর্ড সরঞ্জামগুলি সৌর, সেইসাথে স্বায়ত্তশাসিত রাসায়নিক ব্যাটারি এবং বাফার ব্যাটারি সহ একটি কেন্দ্রীভূত পাওয়ার সাপ্লাই সিস্টেম থেকে শক্তি গ্রহণ করে। মহাকাশযানটি অরবিটাল স্টেশনের সাথে ডক করার পরে, সৌর প্যানেলগুলি সামগ্রিক বিদ্যুৎ সরবরাহ ব্যবস্থায় ব্যবহার করা যেতে পারে।
লাইফ সাপোর্ট সিস্টেমের মধ্যে রয়েছে ডিসেন্ট ভেহিকলের বায়ুমণ্ডল এবং অরবিটাল কম্পার্টমেন্ট (পৃথিবীর বাতাসের কাছাকাছি) এবং তাপ নিয়ন্ত্রণ, খাদ্য ও জল সরবরাহ, এবং একটি পয়ঃনিষ্কাশন ও স্যানিটারি ব্যবস্থা। অক্সিজেন মুক্ত করার সময় কার্বন ডাই অক্সাইড শোষণ করে এমন পদার্থ দ্বারা পুনর্জন্ম নিশ্চিত করা হয়। বিশেষ ফিল্টার ক্ষতিকারক অমেধ্য শোষণ করে। জীবন্ত কম্পার্টমেন্টের সম্ভাব্য জরুরী চাপের ক্ষেত্রে, ক্রুদের জন্য স্পেসসুট সরবরাহ করা হয়। এগুলিতে কাজ করার সময়, অন-বোর্ড প্রেসারাইজেশন সিস্টেম থেকে স্যুটে বাতাস সরবরাহ করে জীবনের জন্য শর্ত তৈরি করা হয়।
তাপ নিয়ন্ত্রণ ব্যবস্থা 15-25 ডিগ্রি সেলসিয়াসের মধ্যে এবং আপেক্ষিকভাবে জীবন্ত বগিতে বাতাসের তাপমাত্রা বজায় রাখে। আর্দ্রতা 20-70% এর মধ্যে; যন্ত্র বিভাগে গ্যাসের তাপমাত্রা (নাইট্রোজেন) 0-40 ডিগ্রি সে.
রেডিও সরঞ্জামের কমপ্লেক্সটি মহাকাশযানের কক্ষপথের পরামিতি নির্ধারণ, পৃথিবী থেকে আদেশ গ্রহণ, পৃথিবীর সাথে দ্বি-মুখী টেলিফোন এবং টেলিগ্রাফ যোগাযোগ, আর্থ টেলিভিশনে কম্পার্টমেন্টের পরিস্থিতি এবং বাহ্যিক পরিবেশের চিত্রগুলি প্রেরণ করার জন্য ডিজাইন করা হয়েছে। একটি টিভি ক্যামেরা।
1967 - 1981 এর জন্য কৃত্রিম আর্থ স্যাটেলাইটের চারপাশে 38টি মনুষ্যবাহী সয়ুজ মহাকাশযান কক্ষপথে চালু করা হয়েছিল।
V.M. Komarov দ্বারা চালিত সয়ুজ-1, 23 এপ্রিল, 1967 সালে জাহাজের পরীক্ষা এবং এর নকশার সিস্টেম এবং উপাদানগুলি পরীক্ষা করার উদ্দেশ্যে চালু করা হয়েছিল। অবতরণের সময় (19 তম কক্ষপথে), সয়ুজ-1 নিরাপদে বায়ুমণ্ডলের ঘন স্তরে ক্ষয়কারী অংশ অতিক্রম করে এবং প্রথম পালানোর বেগ নিভিয়ে ফেলে। যাইহোক, ~7 কিমি উচ্চতায় প্যারাসুট সিস্টেমের অস্বাভাবিক অপারেশনের কারণে, অবতরণকারী যানটি উচ্চ গতিতে নেমে আসে, যার ফলে মহাকাশচারীর মৃত্যু হয়।
Soyuz-2 মহাকাশযান (মানুষবিহীন) এবং Soyuz-3 (G.T. Beregov দ্বারা চালিত) একটি যৌথ ফ্লাইট করেছে সিস্টেম এবং ডিজাইনের অপারেশন পরীক্ষা করার জন্য, মিলনমেলা এবং চালচলন অনুশীলন করার জন্য। যৌথ পরীক্ষা-নিরীক্ষার শেষে, জাহাজগুলি এরোডাইনামিক দক্ষতা ব্যবহার করে একটি নিয়ন্ত্রিত অবতরণ করে।
Soyuz-6, Soyuz-7, এবং Soyuz-8 মহাকাশযানে একটি গ্রুপ ফ্লাইট চালানো হয়েছিল। বৈজ্ঞানিক ও প্রযুক্তিগত পরীক্ষা-নিরীক্ষার একটি প্রোগ্রাম সম্পন্ন হয়েছিল, যার মধ্যে গভীর শূন্যতা এবং ওজনহীনতার পরিস্থিতিতে ধাতু ঢালাই এবং কাটার পরীক্ষার পদ্ধতি, নেভিগেশন অপারেশন এবং পারস্পরিক কৌশল পরীক্ষা করা হয়েছিল, জাহাজগুলি একে অপরের সাথে এবং স্থল-ভিত্তিক কমান্ড এবং পরিমাপ পয়েন্টগুলির সাথে যোগাযোগ করেছিল, এবং তিনটি মহাকাশযানের একযোগে ফ্লাইট নিয়ন্ত্রণ করা হয়েছিল।
Soyuz-23 এবং Soyuz-25 মহাকাশযান একটি Salyut-টাইপ অরবিটাল স্টেশনের সাথে ডক করার জন্য নির্ধারিত ছিল। আপেক্ষিক গতি পরামিতি (Soyuz-23 মহাকাশযান) পরিমাপের জন্য সরঞ্জামগুলির ভুল অপারেশনের কারণে, ম্যানুয়াল মুরিং বিভাগে (Soyuz-25) নির্দিষ্ট অপারেটিং মোড থেকে বিচ্যুতি, ডকিং হয়নি। এই জাহাজগুলি স্যালুট-টাইপ অরবিটাল স্টেশনগুলির সাথে চালচলন এবং মিলন অনুশীলনের জন্য ব্যবহৃত হত।
দীর্ঘমেয়াদী মহাকাশ ফ্লাইটের সময়, ইলেক্ট্রোম্যাগনেটিক রেডিয়েশনের বিস্তৃত বর্ণালীতে সূর্য, গ্রহ এবং নক্ষত্রের অধ্যয়নের একটি বৃহৎ কমপ্লেক্স করা হয়েছিল। প্রথমবারের জন্য (Soyuz-18) অরোরার একটি বিস্তৃত ফটো- এবং বর্ণালী অধ্যয়ন, সেইসাথে একটি বিরল প্রাকৃতিক ঘটনা - নিশাচর মেঘ - সম্পাদিত হয়েছিল। দীর্ঘমেয়াদী স্পেস ফ্লাইট ফ্যাক্টরগুলির প্রভাবে মানবদেহের প্রতিক্রিয়াগুলির ব্যাপক গবেষণা করা হয়েছে। ওজনহীনতার বিরূপ প্রভাব প্রতিরোধের বিভিন্ন উপায় পরীক্ষা করা হয়েছে।
3-মাসের ফ্লাইটের সময়, সয়ুজ-20, স্যালিউট-4 সহ, সহনশীলতা পরীক্ষা করেছিল।
সয়ুজ মহাকাশযানের ভিত্তিতে, প্রোগ্রেস কার্গো পরিবহন মহাকাশযান তৈরি করা হয়েছিল এবং সয়ুজ মহাকাশযান পরিচালনার অভিজ্ঞতার ভিত্তিতে একটি উল্লেখযোগ্যভাবে আধুনিক সয়ুজ টি মহাকাশযান তৈরি করা হয়েছিল।
সয়ুজ মহাকাশযানের উৎক্ষেপণ একটি 3-পর্যায়ের সয়ুজ লঞ্চ ভেহিকেল দ্বারা পরিচালিত হয়েছিল।
সয়ুজ মহাকাশযান প্রোগ্রাম।
সয়ুজ-১ মহাকাশযান। মহাকাশচারী - ভিএম কোমারভ। কল সাইন - "রুবি"। লঞ্চ - 04/23/1967, অবতরণ - 04/24/1967। উদ্দেশ্য - একটি নতুন জাহাজের পরীক্ষা। সয়ুজ-২ মহাকাশযানের সাথে তিনটি মহাকাশচারীকে নিয়ে যাওয়ার পরিকল্পনা করা হয়েছিল খোলা জায়গাদুই মহাকাশচারী, এবং বোর্ডে তিন মহাকাশচারীর সাথে অবতরণ। সয়ুজ-1 মহাকাশযানে বেশ কয়েকটি সিস্টেমের ব্যর্থতার কারণে, সয়ুজ-২-এর উৎক্ষেপণ বাতিল করা হয়েছিল। (এই প্রোগ্রামটি 1969 সালে মহাকাশযান দ্বারা পরিচালিত হয়েছিল
"Soyuz-4" এবং "Soyuz-5")। পৃথিবীতে ফিরে আসার সময়, মহাকাশচারী ভ্লাদিমির কোমারভ প্যারাসুট সিস্টেমের ভুল অপারেশনের কারণে মারা গিয়েছিলেন।
সয়ুজ-২ মহাকাশযান (মানবহীন)। উৎক্ষেপণ - 10/25/1968, অবতরণ - 10/28/1968। উদ্দেশ্য: পরিবর্তিত মহাকাশযানের নকশা পরীক্ষা করা, মনুষ্যবাহী সয়ুজ-3 এর সাথে যৌথ পরীক্ষা-নিরীক্ষা করা (মেলা এবং কৌশল)।
সয়ুজ-৩ মহাকাশযান। মহাকাশচারী - জিটি বেরেগোভয়। কল সাইন - "আর্গন"। লঞ্চ - 26 অক্টোবর, 1968, অবতরণ - 30 অক্টোবর, 1968। উদ্দেশ্য: জাহাজের পরিবর্তিত নকশা পরীক্ষা করা, মানববিহীন সয়ুজ-2-এর সাথে মিলিত হওয়া এবং চালচলন করা।
সয়ুজ-৪ মহাকাশযান। কক্ষপথে দুটি মনুষ্যবাহী মহাকাশযানের প্রথম ডকিং - প্রথম পরীক্ষামূলক অরবিটাল স্টেশন তৈরি। কমান্ডার - ভিএ শাতালভ। কল সাইন - "কাউপিড"। লঞ্চ - 01/14/1969 01/16। 1969 ম্যানুয়ালি প্যাসিভ সয়ুজ-5 মহাকাশযান (দুটি মহাকাশযানের সংমিশ্রণের ভর - 12924 কেজি) দিয়ে ডক করা হয়েছিল, যেখান থেকে দুই মহাকাশচারী এ.এস. এলিসিভ এবং ই.ভি. ক্রুনভ বাইরের মহাকাশ দিয়ে সয়ুজ-4 (বহিঃ মহাকাশে কাটানো সময় - 37 মিনিট)। 4.5 ঘন্টা পরে জাহাজগুলি আনডক করা হয়। অবতরণ - 01/17/1969 মহাকাশচারীদের সাথে V.A. Shatalov, A.S. Eliseev, E.V. Khrunov.
মহাকাশযান "Soyuz-5"। দুটি মনুষ্যবাহী মহাকাশযানের কক্ষপথে প্রথম ডকিং - প্রথম পরীক্ষামূলক অরবিটাল স্টেশন তৈরি। কমান্ডার - বিভি ভোলিনভ, ক্রু সদস্য: এএস এলিসিভ, ইভি ক্রুনভ। কল সাইন - "বৈকাল"। উৎক্ষেপণ - 01/15/1969। 01/16/1969 সক্রিয় সয়ুজ-4 মহাকাশযান (নক্ষত্রপুঞ্জের ভর - 12924 কেজি), তারপর A.S এলিসিভ এবং ই.ভি. খ্রুনভ বাইরের মহাকাশের মাধ্যমে সয়ুজ-4-এ স্থানান্তরিত হয় "(বহিঃ মহাকাশে কাটানো সময়) - 37 মিনিট)। 4.5 ঘন্টা পরে জাহাজগুলি আনডক করা হয়। অবতরণ - 01/18/1969 মহাকাশচারী B.V. ভলিনোভের সাথে।
সয়ুজ-6 মহাকাশযান। বিশ্বের প্রথম প্রযুক্তি পরীক্ষা সম্পাদন করা। দুই এবং তিনটি মহাকাশযানের গ্রুপ পারস্পরিক কৌশল (সয়ুজ-7 এবং সয়ুজ-8 সহ)। ক্রু: কমান্ডার জিএস শোনিন এবং ফ্লাইট ইঞ্জিনিয়ার ভিএন কুবাসভ। কল সাইন - "Antey"। লঞ্চ - 10/11/1969 অবতরণ - 10/16/1969
মহাকাশযান "Soyuz-7"। দুই এবং তিনটি জাহাজের ("Soyuz-6" এবং "Soyuz-8") গ্রুপ পারস্পরিক কৌশল সম্পাদন করা। ক্রু: কমান্ডার এ.ভি. ফিলিপচেঙ্কো, ক্রু সদস্যরা: ভিএন ভলকভ, ভিভি গরবাটকো। কল সাইন - "বুরান"। লঞ্চ - 10/12/1969, অবতরণ - 10/17/1969।
সয়ুজ-৮ মহাকাশযান। দুই এবং তিনটি জাহাজের ("Soyuz-6" এবং "Soyuz-7") গ্রুপ পারস্পরিক কৌশল। ক্রু: কমান্ডার ভিএ শাতালভ, ফ্লাইট ইঞ্জিনিয়ার এএস এলিসিভ। কল সাইন - "গ্রানাইট"। লঞ্চ - 10/13/1969, অবতরণ - 10/18/1969।
স্পেসশিপ "Soyuz-9"। প্রথম দীর্ঘ ফ্লাইট (17.7 দিন)। ক্রু: কমান্ডার এজি নিকোলাভ, ফ্লাইট ইঞ্জিনিয়ার - ভিআই সেবাস্তিয়ানভ। কল সাইন - "ফ্যালকন"। লঞ্চ - 06/1/1970, ল্যান্ডিং - 06/19/1970।
মহাকাশযান "Soyuz-10"। Salyut অরবিটাল স্টেশনের সাথে প্রথম ডকিং। ক্রু: কমান্ডার ভিএ শাতালভ, ক্রু সদস্যরা: এএস এলিসিভ, এনএন রুকাভিশনিকভ। কল সাইন - "গ্রানাইট"। লঞ্চ - 04/23/1971 অবতরণ - 04/25/1971 স্যালিউট অরবিটাল স্টেশনের সাথে ডকড (04/24/1971), কিন্তু ক্রুরা স্টেশনে ট্রানজিশন হ্যাচ খুলতে অক্ষম ছিল; 04/24/1971 তারিখে মহাকাশযানটি অরবিটাল স্টেশন স্টেশন থেকে বিচ্ছিন্ন এবং নির্ধারিত সময়ের আগে ফিরে এসেছে।
মহাকাশযান "Soyuz-11"। সাল্যুত অরবিটাল স্টেশনে প্রথম অভিযান। ক্রু: কমান্ডার জিটি ডব্রোভলস্কি, ক্রু সদস্যরা: ভিএন ভলকভ, ভিআই পাটসেভ। লঞ্চ - 6 জুন, 1971। 7 জুন, 1971, জাহাজটি স্যালুট অরবিটাল স্টেশনের সাথে ডক করে। 06/29/1971 সয়ুজ-11 অরবিটাল স্টেশন থেকে আনডক করা হয়েছে। 06/30/1971 - অবতরণ করা হয়েছিল। উচ্চ উচ্চতায় ডিসেন্ট মডিউলের চাপের কারণে, সমস্ত ক্রু সদস্য মারা যায় (ফ্লাইটটি স্পেসসুট ছাড়াই চালানো হয়েছিল)।
মহাকাশযান "Soyuz-12"। উন্নত জাহাজের জাহাজ সিস্টেমের পরীক্ষা পরিচালনা করা। জরুরী ডিপ্রেসারাইজেশনের ক্ষেত্রে ক্রু রেসকিউ সিস্টেম চেক করা হচ্ছে। ক্রু: কমান্ডার ভিজি লাজারেভ, ফ্লাইট ইঞ্জিনিয়ার ওজি মাকারভ। কল সাইন - "উরাল"। লঞ্চ - 09/27/1973, অবতরণ - 09/29/1973।
মহাকাশযান "Soyuz-13"। তারার আকাশের অঞ্চলগুলির ওরিয়ন-2 টেলিস্কোপ সিস্টেম ব্যবহার করে অতিবেগুনী পরিসরে জ্যোতির্বিদ্যাগত পর্যবেক্ষণ এবং বর্ণালী গ্রাফি করা। ক্রু: কমান্ডার পিআই ক্লিমুক, ফ্লাইট ইঞ্জিনিয়ার ভিভি লেবেদেভ। কল সাইন - "ককেশাস"। লঞ্চ - 12/18/1973, অবতরণ - 12/26/1973।
 মহাকাশযান "Soyuz-14"। Salyut-3 অরবিটাল স্টেশনে প্রথম অভিযান। ক্রু: কমান্ডার পিআর পপোভিচ, ফ্লাইট ইঞ্জিনিয়ার ইউপি আর্টিউখিন। কল সাইন - "Berkut"। লঞ্চ - 07/3/1974, অরবিটাল স্টেশনের সাথে ডকিং - 07/5/1974, বিচ্ছেদ - 07/19/1974, অবতরণ - 07/19/1974।
মহাকাশযান "Soyuz-14"। Salyut-3 অরবিটাল স্টেশনে প্রথম অভিযান। ক্রু: কমান্ডার পিআর পপোভিচ, ফ্লাইট ইঞ্জিনিয়ার ইউপি আর্টিউখিন। কল সাইন - "Berkut"। লঞ্চ - 07/3/1974, অরবিটাল স্টেশনের সাথে ডকিং - 07/5/1974, বিচ্ছেদ - 07/19/1974, অবতরণ - 07/19/1974।
মহাকাশযান "Soyuz-15"। ক্রু: কমান্ডার জিভি সারাফানভ, ফ্লাইট ইঞ্জিনিয়ার এলএস ডেমিন। কল সাইন - "ড্যানিউব"। লঞ্চ - 08/26/1974, ল্যান্ডিং 08/28/1974। এটি Salyut-3 অরবিটাল স্টেশনের সাথে ডক করার এবং এটিতে বৈজ্ঞানিক গবেষণা চালিয়ে যাওয়ার পরিকল্পনা করা হয়েছিল। ডকিং সঞ্চালিত হয়নি.
মহাকাশযান "Soyuz-16"। ASTP প্রোগ্রাম অনুসারে আধুনিক সয়ুজ মহাকাশযানের অনবোর্ড সিস্টেমের পরীক্ষা। ক্রু: কমান্ডার এভি ফিলিপচেঙ্কো, ফ্লাইট ইঞ্জিনিয়ার এনএন রুকাভিশনিকভ। কল সাইন - "বুরান"। লঞ্চ - 2 ডিসেম্বর, 1974, অবতরণ - 8 ডিসেম্বর, 1974।
মহাকাশযান "Soyuz-17"। Salyut-4 অরবিটাল স্টেশনে প্রথম অভিযান। ক্রু: কমান্ডার এএ গুবারেভ, ফ্লাইট ইঞ্জিনিয়ার জিএম গ্রেচকো। কল সাইন - "জেনিথ"। লঞ্চ - 01/11/1975, Salyut-4 অরবিটাল স্টেশনের সাথে ডকিং - 01/12/1975, বিচ্ছেদ এবং নরম অবতরণ - 02/9/1975।
মহাকাশযান Soyuz-18-1. সাববরবিটাল ফ্লাইট। ক্রু: কমান্ডার ভিজি লাজারেভ, ফ্লাইট ইঞ্জিনিয়ার ওজি মাকারভ। কল নাম - নিবন্ধিত নয়। লঞ্চ এবং অবতরণ - 04/05/1975। এটি Salyut-4 অরবিটাল স্টেশনে বৈজ্ঞানিক গবেষণা চালিয়ে যাওয়ার পরিকল্পনা করা হয়েছিল। লঞ্চ গাড়ির 3য় পর্যায়ের অপারেশনে বিচ্যুতির কারণে, ফ্লাইটটি বন্ধ করার জন্য একটি আদেশ জারি করা হয়েছিল। মহাকাশযানটি গোর্নো-আলতাইস্কের দক্ষিণ-পশ্চিমে একটি অফ-ডিজাইন এলাকায় অবতরণ করেছে
মহাকাশযান "Soyuz-18"। Salyut-4 অরবিটাল স্টেশনে দ্বিতীয় অভিযান। ক্রু: কমান্ডার পিআই ক্লিমুক, ফ্লাইট ইঞ্জিনিয়ার ভিআই সেবাস্তিয়ানভ। কল সাইন - "ককেশাস"। লঞ্চ - 05/24/1975, Salyut-4 অরবিটাল স্টেশনের সাথে ডকিং - 05/26/1975, বিচ্ছেদ, অবতরণ এবং নরম অবতরণ - 07/26/1975।
মহাকাশযান "Soyuz-19"। সোভিয়েত-আমেরিকান ASTP প্রোগ্রামের অধীনে প্রথম ফ্লাইট। ক্রু: কমান্ডার - এএ লিওনভ, ফ্লাইট ইঞ্জিনিয়ার ভিএন কুবাসভ। কল সাইন - "সয়ুজ"। লঞ্চ - 07/15/1975, 07/17/1975 -
আমেরিকান অ্যাপোলো মহাকাশযানের সাথে ডকিং। 19 জুলাই, 1975-এ, পরীক্ষাটি সম্পাদন করে জাহাজগুলি আনডক করে " সূর্যগ্রহণ", তারপরে (07/19) দুটি মহাকাশযানের পুনরায় ডকিং এবং চূড়ান্ত আনডকিং করা হয়েছিল। অবতরণ - 07/21/1975। যৌথ ফ্লাইটের সময়, মহাকাশচারী এবং নভোচারীদের পারস্পরিক স্থানান্তর করা হয়েছিল এবং একটি বড় বৈজ্ঞানিক প্রোগ্রাম সম্পন্ন হয়েছিল।
মহাকাশযান "Soyuz-20"। মানবহীন। লঞ্চ - 17 নভেম্বর, 1975, স্যালিউট-4 অরবিটাল স্টেশনের সাথে ডকিং - 19 নভেম্বর, 1975, বিচ্ছেদ, অবতরণ এবং অবতরণ - 16 ফেব্রুয়ারি, 1975। জাহাজের অনবোর্ড সিস্টেমের জীবন পরীক্ষা করা হয়েছিল।
মহাকাশযান "Soyuz-21"। Salyut-5 অরবিটাল স্টেশনে প্রথম অভিযান। ক্রু: কমান্ডার বিভি ভোলিনভ, ফ্লাইট ইঞ্জিনিয়ার ভিএম ঝোলোবভ। কল সাইন - "বৈকাল"। লঞ্চ - 07/06/1976, Salyut-5 অরবিটাল স্টেশনের সাথে ডকিং - 07/7/1976, আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 08/24/1976।
মহাকাশযান "Soyuz-22"। সাইটের মাল্টিস্পেকট্রাল ফটোগ্রাফির নীতি ও পদ্ধতির বিকাশ ভূ - পৃষ্ঠ. ক্রু: কমান্ডার ভিএফ বাইকভস্কি, ফ্লাইট ইঞ্জিনিয়ার ভিভি আকসেনভ। কল সাইন - "হক"। লঞ্চ - 09/15/1976, অবতরণ - 09/23/1976।
মহাকাশযান "Soyuz-23"। ক্রু: কমান্ডার ভিডি জুডভ, ফ্লাইট ইঞ্জিনিয়ার ভিআই রোজডেস্টভেনস্কি। কল সাইন - "Radon"। লঞ্চ - 10/14/1976 অবতরণ - 10/16/1976 কাজটি Salyut-5 অরবিটাল স্টেশনে পরিকল্পনা করা হয়েছিল। মহাকাশযান রেন্ডেজভাস সিস্টেমের অফ-ডিজাইন অপারেটিং মোডের কারণে, Salyut-5 এর সাথে ডকিং করা হয়নি।
মহাকাশযান "Soyuz-24"। Salyut-5 অরবিটাল স্টেশনে দ্বিতীয় অভিযান। ক্রু: কমান্ডার ভিভি গরবাটকো, ফ্লাইট ইঞ্জিনিয়ার ইউএন গ্লাজকভ। কল সাইন - "টেরেক"। লঞ্চ - 02/7/1977 Salyut-5 অরবিটাল স্টেশনের সাথে ডকিং - 02/8/1976 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 02/25/1977
মহাকাশযান "Soyuz-25"। ক্রু: কমান্ডার ভিভি কোভালেনক, ফ্লাইট ইঞ্জিনিয়ার ভিভি রিউমিন। কল সাইন - "ফোটন"। লঞ্চ - 10/9/1977 অবতরণ - 10/11/1977 এটি নতুন অরবিটাল স্টেশন Salyut-6 এর সাথে ডক করার এবং এটির উপর একটি বৈজ্ঞানিক গবেষণা কার্যক্রম বাস্তবায়নের পরিকল্পনা করা হয়েছিল। ডকিং সঞ্চালিত হয়নি.
মহাকাশযান "Soyuz-26"। Salyut-6 অরবিটাল স্টেশনে প্রথম প্রধান অভিযানের ক্রুদের ডেলিভারি। ক্রু: কমান্ডার Yu.V.Romanenko, ফ্লাইট ইঞ্জিনিয়ার G.M.Grechko। লঞ্চ - 12/10/1977 Salyut-6 এর সাথে ডকিং - 12/11/1977 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 01/16/1978 1ম পরিদর্শন অভিযানের ক্রুদের সাথে যার মধ্যে রয়েছে: V.A. জানিবেকভ, O.G. .মাকারভের জন্য সময় সালিউত -6 কমপ্লেক্সে অন্তর্ভুক্ত মহাকাশযানের বিনিময় ছিল)।
মহাকাশযান "Soyuz-27"। Salyut-6 অরবিটাল স্টেশনে প্রথম পরিদর্শন অভিযানের ডেলিভারি। ক্রু: কমান্ডার ভিএ জানিবেকভ, ফ্লাইট ইঞ্জিনিয়ার ওজি মাকারভ। লঞ্চ - 01/10/1978 Salyut-6 অরবিটাল স্টেশনের সাথে ডকিং - 01/11/1978 বিচ্ছেদ, অবতরণ এবং অবতরণ 03/16/1978 1ম প্রধান অভিযানের ক্রুদের সাথে যার মধ্যে রয়েছে: Yu.V. Romanenko, G. এম গ্রেচকো।
মহাকাশযান "Soyuz-28"। Salyut-6 অরবিটাল স্টেশনে 1ম আন্তর্জাতিক ক্রু (2য় পরিদর্শন অভিযান) ডেলিভারি। ক্রু: কমান্ডার - এ.এ. গুবারেভ, মহাকাশচারী-গবেষক - চেকোস্লোভাকিয়ার নাগরিক ভি. রেমেক। লঞ্চ - 03/2/1978 Salyut-6 এর সাথে ডকিং - 03/3/1978 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 03/10/1978
মহাকাশযান "Soyuz-29"। স্যালিউট-6 অরবিটাল স্টেশনে ২য় প্রধান অভিযানের ক্রুদের ডেলিভারি। ক্রু: কমান্ডার - ভিভি কোভালেনক, ফ্লাইট ইঞ্জিনিয়ার - এএস ইভানচেনকভ। লঞ্চ - 06/15/1978 Salyut-6-এর সাথে ডকিং - 06/17/1978 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং 09/3/1978 4 র্থ পরিদর্শন অভিযানের ক্রু সহ: V.F. Bykovsky, Z. ইয়েন (GDR)।
মহাকাশযান "Soyuz-30"। Salyut-6 অরবিটাল স্টেশনে ডেলিভারি এবং 3য় পরিদর্শন অভিযানের ক্রুদের ফিরে আসা (দ্বিতীয় আন্তর্জাতিক ক্রু)। ক্রু: কমান্ডার পি.আই. ক্লিমুক, মহাকাশচারী-গবেষক, পোল্যান্ডের নাগরিক এম জার্মাশেভস্কি। লঞ্চ - 06/27/1978 Salyut-6 এর সাথে ডকিং - 06/28/1978 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 07/5/1978
স্পেসশিপ "Soyuz-31"। Salyut-6 অরবিটাল স্টেশনে চতুর্থ পরিদর্শন অভিযানের (৩য় আন্তর্জাতিক ক্রু) ক্রুদের ডেলিভারি। ক্রু: কমান্ডার - ভিএফ বাইকভস্কি, মহাকাশচারী-গবেষক, জিডিআর জেড জেন এর নাগরিক। লঞ্চ - 08/26/1978 Salyut-6 অরবিটাল স্টেশনের সাথে ডকিং - 08/27/1978 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 11/2/1978 2 য় প্রধান অভিযানের ক্রু সহ: V.V. Kovalenok, A .S. ইভানচেনকভ।
মহাকাশযান "Soyuz-32"। Salyut-6 অরবিটাল স্টেশনে 3য় প্রধান অভিযানের ডেলিভারি। ক্রু: কমান্ডার ভিএ লায়াখভ, ফ্লাইট ইঞ্জিনিয়ার ভিভি রিউমিন। লঞ্চ - 02/25/1979 Salyut-6 এর সাথে ডকিং - 02/26/1979 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং 06/13/1979 স্বয়ংক্রিয় মোডে ক্রু ছাড়াই৷
মহাকাশযান "Soyuz-33"। ক্রু: কমান্ডার এনএন রুকাভিশনিকভ, মহাকাশচারী-গবেষক, বুলগেরিয়ার নাগরিক জিআই ইভানভ। কল সাইন - "শনি"। লঞ্চ - 04/10/1979। 04/11/1979 মিলন-সংশোধন ইনস্টলেশনের স্বাভাবিক অপারেশন থেকে বিচ্যুতির কারণে, Salyut-6 অরবিটাল স্টেশনের সাথে ডকিং বাতিল করা হয়েছিল। 12 এপ্রিল, 1979 তারিখে, জাহাজটি তার অবতরণ এবং অবতরণ করে।
মহাকাশযান "Soyuz-34"। ক্রু ছাড়াই 6 জুন, 1979-এ লঞ্চ হয়। Salyut-6 অরবিটাল স্টেশনের সাথে ডকিং - 06/8/1979 06/19/1979 3য় প্রধান অভিযানের ক্রুদের সাথে আনডকিং, অবতরণ এবং অবতরণ: V.A. লিয়াখভ, V.V. Ryumin। (ডিসেন্ট মডিউলটি K.E. Tsiolkovsky স্টেট মিউজিয়াম অফ কালচারে প্রদর্শিত হয়)।
মহাকাশযান "Soyuz-35"। Salyut-6 অরবিটাল স্টেশনে 4র্থ প্রধান অভিযানের ডেলিভারি। ক্রু: কমান্ডার এলআই পপভ, ফ্লাইট ইঞ্জিনিয়ার ভিভি রিউমিন। লঞ্চ - 04/09/1980 Salyut-6 এর সাথে ডকিং - 04/10/1980 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং 06/3/1980 5 তম পরিদর্শন অভিযানের ক্রুদের সাথে (4র্থ আন্তর্জাতিক ক্রু যার মধ্যে রয়েছে: V.N. Kubasov, B. Farkas.
মহাকাশযান "Soyuz-36"। Salyut-6 অরবিটাল স্টেশনে 5 তম পরিদর্শন অভিযানের (4র্থ আন্তর্জাতিক ক্রু) ক্রুদের ডেলিভারি। ক্রু: কমান্ডার ভিএন কুবাসভ, মহাকাশচারী-গবেষক, হাঙ্গেরির নাগরিক বি ফারকাস। লঞ্চ - 05/26/1980 Salyut-6-এর সাথে ডকিং - 05/27/1980 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং 08/3/1980 7 তম পরিদর্শন অভিযানের ক্রু সহ: V.V. Gorbatko, Pham Tuan (ভিয়েতনাম)৷
মহাকাশযান "Soyuz-37"। অরবিটাল স্টেশনে 7 তম পরিদর্শন অভিযানের (5 তম আন্তর্জাতিক ক্রু) ক্রুদের ডেলিভারি। ক্রু: কমান্ডার ভিভি গরবাটকো, মহাকাশচারী-গবেষক, ভিয়েতনামের নাগরিক ফাম তুয়ান। লঞ্চ - 07/23/1980 Salyut-6-এর সাথে ডকিং - 07/24/1980 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 10/11/1980 4র্থ প্রধান অভিযানের ক্রু সহ: L.I. Popov, V.V. .Ryumin।
মহাকাশযান "Soyuz-38"। Salyut-6 অরবিটাল স্টেশনে ডেলিভারি এবং 8 তম পরিদর্শন অভিযানের ক্রুদের ফিরে আসা (6 তম আন্তর্জাতিক ক্রু)। ক্রু: কমান্ডার ইউ.ভি. রোমানেনকো, মহাকাশচারী-গবেষক, কিউবার নাগরিক M.A. তামায়ো। লঞ্চ - 09/18/1980 Salyut-6 এর সাথে ডকিং - 09/19/1980 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং 09/26/1980
মহাকাশযান "Soyuz-39"। Salyut-6 অরবিটাল স্টেশনে ডেলিভারি এবং 10 তম পরিদর্শন অভিযানের (7 তম আন্তর্জাতিক ক্রু) ফিরে আসা। ক্রু: কমান্ডার V.A.Dzhanibekov, মহাকাশচারী-গবেষক, মঙ্গোলিয়ার নাগরিক Zh.Gurragcha। লঞ্চ - 03/22/1981 Salyut-6 এর সাথে ডকিং - 03/23/1981 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং - 03/30/1981
মহাকাশযান "Soyuz-40"। Salyut-6 অরবিটাল স্টেশনে ডেলিভারি এবং 11 তম পরিদর্শন অভিযানের (8তম আন্তর্জাতিক ক্রু) ক্রুদের প্রত্যাবর্তন। ক্রু: কমান্ডার L.I. Popov, মহাকাশচারী-গবেষক, রোমানিয়ার নাগরিক D. Prunariu. লঞ্চ - 05/14/1981 Salyut-6 এর সাথে ডকিং - 05/15/1981 আনডকিং, ডিসেন্ট এবং ল্যান্ডিং 05/22/1981
স্পেসশিপ ববকভ ভ্যালেন্টিন নিকোলাভিচ
বহুমুখী মহাকাশযান "সয়ুজ"
বহুমুখী মহাকাশযান "সয়ুজ"
মহাকাশযানের নকশা, এর মাত্রা এবং ওজন, সেইসাথে প্রধান সিস্টেমগুলির গঠন এবং তাদের প্রধান বৈশিষ্ট্যগুলি ফ্লাইটে সমাধান করা কাজের উপর নির্ভর করে। তবে ব্যাপক ক্ষমতাসম্পন্ন বহুমুখী মহাকাশযানও তৈরি করা হয়েছে। এর মধ্যে প্রাথমিকভাবে সয়ুজ মহাকাশযান এবং এর পরিবর্তনগুলি অন্তর্ভুক্ত রয়েছে। ভোস্টক মহাকাশযানে প্রথম মহাকাশচারীদের উড্ডয়নের পরপরই 60 এর দশকের গোড়ার দিকে এই মহাকাশযানের বিকাশের কাজ শুরু হয়েছিল।
নতুন মহাকাশযানটি তার পূর্বসূরীদের থেকে বিন্যাস এবং রচনায় উল্লেখযোগ্যভাবে ভিন্ন ছিল, এবং এর প্রধান সিস্টেমগুলি কেবল আবার বিকশিত হয়নি, বরং আরও সর্বজনীন করে তুলেছে। সয়ুজ মহাকাশযানের পরবর্তী পরিবর্তনের সাথে, এই সিস্টেমগুলি আরও উন্নত করা হয়েছিল। তবুও, সয়ুজ মহাকাশযানের মূল বিন্যাসটি তার আসল সংস্করণে সংরক্ষিত ছিল এবং এই মহাকাশযানটি স্বায়ত্তশাসিত ফ্লাইটে এবং অরবিটাল কমপ্লেক্সের অংশ হিসাবে বেশ কয়েকটি নতুন প্রযুক্তিগত সমস্যা সমাধান করা সম্ভব করেছিল।
সমগ্র সয়ুজ রকেট এবং স্পেস সিস্টেমের লঞ্চ ভর ছিল 310 টন।
মহাকাশে প্রথম মানুষের ফ্লাইট দেখায় যে কক্ষপথে একজন ব্যক্তির থাকার সময়কাল বাড়ানোর জন্য, মহাকাশযানের অভ্যন্তরের অবস্থার উন্নতি করা প্রয়োজন; প্রথমত, নভোচারীদের জন্য আরও প্রশস্ত কক্ষ প্রয়োজন। এটি জেমিনি মহাকাশযানের কেবিনে আমেরিকান মহাকাশচারীদের দীর্ঘ (2 সপ্তাহ পর্যন্ত) ফ্লাইটের সময় বিশেষত স্পষ্ট ছিল। এই মহাকাশচারীদের মতে, কে কে কেবিনটি একটি ক্ষুদ্র ভক্সওয়াগেন গাড়ির সামনের তুলনায় ছোট ছিল, কিন্তু একটি অতিরিক্ত নিয়ন্ত্রণ প্যানেলের সাহায্যে একটি বড় রঙিন টেলিভিশনের আকার আসনগুলির মধ্যে চাপা পড়েছিল। এমন একটি কেবিনে কয়েক ঘন্টার জন্যও পৃথিবীতে থাকা কঠিন ছিল (এক অর্থে, ওজনহীনতার কারণে মহাকাশে দীর্ঘ সময় থাকতে সাহায্য করা হয়েছিল)।
ভাত। 6. সয়ুজ মহাকাশযানের বিন্যাস
সয়ুজ মহাকাশযান (ছবি 6) ডিজাইন করা শুরু করার সময়, বিশেষজ্ঞরা এর রচনায় একটি অতিরিক্ত জীবন্ত বগি প্রবর্তন করার সিদ্ধান্ত নেন, যাকে তারা গৃহস্থালী (বা অরবিটাল) বলে। বগিটি নভোচারীদের একটি কাজের ঘর, একটি বিশ্রাম কক্ষ, একটি খাবার ঘর, একটি পরীক্ষাগার এবং একটি এয়ারলক চেম্বার হিসাবে পরিবেশন করেছিল। এই ব্যবস্থা একটি বহুমুখী নিষ্পত্তিযোগ্য সিসি জন্য যুক্তিসঙ্গত. বিশেষ করে, এটি SA এর মাত্রা এবং ওজন হ্রাস করা সম্ভব করেছে, যা পরিচিত, একক-ব্যবহারের CC-এর জন্য যুক্তিযুক্ত বলে মনে হয়। এই ক্ষেত্রে, তাপ সুরক্ষা, প্যারাসুট সিস্টেম, নরম অবতরণ ইঞ্জিন, এবং ডিওরবিট করার জন্য একটি রিজার্ভ জ্বালানী সহ একটি ব্রেকিং প্রপালশন সিস্টেম ন্যূনতম হয়ে যায়।
সয়ুজ মহাকাশযানের আবাসন বগিগুলির মোট অভ্যন্তরীণ আয়তন ছিল 10 m3 এর বেশি, বিনামূল্যের পরিমাণ ছিল 6.5 m3, আবাসন বগির জন্য 4 m3 সহ। মহাকাশযান এবং পরিষেবা বগি ছাড়াও, মহাকাশযানে একটি যন্ত্র এবং সমাবেশ বগি অন্তর্ভুক্ত ছিল, যা, প্রপালশন সিস্টেম ছাড়াও, কক্ষপথে ফ্লাইটে ব্যবহৃত সিস্টেমগুলি রাখা হয়েছিল।
নতুন মহাকাশযান এবং এর পূর্বসূরীদের মধ্যে মৌলিক পার্থক্য ছিল, প্রথমত, কক্ষপথে ব্যাপক চালচলনের সম্ভাবনা। রেন্ডেজভাস-কারেকশন প্রপালশন সিস্টেমের মধ্যে প্রধান এবং রিজার্ভ মাল্টিপল-স্টার্ট ইঞ্জিনগুলি অন্তর্ভুক্ত ছিল, যা যথাক্রমে প্রায় 4.1 এবং 4 kN, 900 কেজি (নাইট্রিক অ্যাসিড + ডাইমেথাইলহাইড্রাজিন) পর্যন্ত দুই-উপাদানের জ্বালানী সহ ট্যাঙ্ক, একটি জ্বালানী সরবরাহ ব্যবস্থা এবং নিয়ন্ত্রণ করে এই প্রপালশন সিস্টেম, ডিঅরবিটিং ছাড়াও, অন্য মহাকাশযানের কাছে যাওয়ার সময় কক্ষপথের পরামিতি এবং মহাকাশযানের কৌশলে পরিবর্তন নিশ্চিত করে।
ডকিং অর্জনের জন্য বার্থিংয়ের সময় চূড়ান্ত কৌশলগুলির জন্য মহাকাশযানের গতির সূক্ষ্ম নিয়ন্ত্রণ প্রয়োজন। এই জন্য, পাশাপাশি ফ্লাইটের বিভিন্ন পর্যায়ে অন্যান্য নিয়ন্ত্রণ মোডগুলি সম্পাদন করার জন্য, সয়ুজ মহাকাশযানটি একটি প্রতিক্রিয়াশীল নিয়ন্ত্রণ ব্যবস্থার সাথে সজ্জিত ছিল, যা বিভিন্ন থ্রাস্টের নিয়ন্ত্রণ ইঞ্জিনের কয়েকটি গ্রুপের সমন্বয়ে গঠিত ছিল (চিত্র 7)।

ভাত। 7. সয়ুজ মহাকাশযানের জেট কন্ট্রোল সিস্টেম: 1 - তাপমাত্রা সেন্সর, 2 - রিজার্ভ গ্যাস সিলিন্ডার, 3 - প্রধান গ্যাস সিলিন্ডার, 4 - চাপ সেন্সর, 5 - ব্যাকআপ বুস্ট ভালভ, 9 - প্রধান বুস্ট ভালভ, 7 - গ্যাস ফিল্টার, 8 - রিডুসার, 9 - ট্যাঙ্ক কম্বিনিং ভালভ, 10 - রিজার্ভ ফুয়েল ট্যাঙ্ক, 11 - প্রধান জ্বালানী ট্যাঙ্ক, 12 - রিজার্ভ ট্যাঙ্ক ভালভ, 13 - প্রধান ট্যাঙ্ক ভালভ, 14 - লাইন সেপারেশন ভালভ, 15. 16 - জ্বালানি সরবরাহ ভালভ , 17 - জ্বালানী ফিল্টার, 18, 19 - ম্যানিফোল্ডস, 20 - স্টার্টিং ভালভ, 21 - স্টার্টিং ভালভ, 22 - লো-থ্রাস্ট ইঞ্জিন, 23 - হাই-থ্রাস্ট ইঞ্জিন
এই গোষ্ঠীগুলির মধ্যে একটি, যন্ত্র এবং সমাবেশ বগিতে মহাকাশযানের ভর কেন্দ্রের কাছে অবস্থিত এবং প্রতিটিতে প্রায় 100 N এর 10 টি ইঞ্জিন রয়েছে, অনুবাদ গতির গতি পরিবর্তন করতে ব্যবহৃত হয়েছিল। একটি অর্থনৈতিক মোডে উচ্চ নির্ভুলতার সাথে মনোভাব নিয়ন্ত্রণ করতে, একই বগির পিছনের অংশে অবস্থিত প্রতিটি 10-15 N থ্রাস্ট সহ 8 টি ইঞ্জিনের একটি গ্রুপ ব্যবহার করা হয়েছিল। পিচ এবং হেডিং-এ অভিমুখী হলে কৌণিক বেগ আরও কার্যকরী বৃদ্ধির জন্য 100 N-এর থ্রাস্ট সহ আরও 4টি ইঞ্জিন ছিল।
প্রথম সোভিয়েত মহাকাশযানের মতো, সয়ুজ মহাকাশযানের জীবন্ত বগিতে স্বাভাবিক অবস্থা বজায় রাখা হয়েছিল। বায়ুমণ্ডল 760 ± 200 mm Hg চাপ সহ। শিল্প. লাইফ সাপোর্ট সিস্টেমটি পূর্বে বর্ণিত নীতিগুলির উপর ভিত্তি করে অনেকগুলি উন্নতি সহ নির্মিত হয়েছিল।
বাহ্যিক তাপ স্থানান্তর কমানোর জন্য, মহাকাশযানের সমস্ত বগি তথাকথিত স্ক্রিন-ভ্যাকুয়াম তাপ নিরোধক দ্বারা উত্তাপিত ছিল। আসল বিষয়টি হ'ল কক্ষপথে সমস্ত ধরণের বাহ্যিক তাপ স্থানান্তর, কার্যত কেবল দীপ্তিমান তাপ স্থানান্তর (সূর্য এবং পৃথিবী থেকে বিকিরণের কারণে গরম হওয়া এবং মহাকাশযানের পৃষ্ঠ থেকে বিকিরণের কারণে শীতল হওয়া) ভ্যাকুয়াম অবস্থার অধীনে গুরুত্বপূর্ণ, যা নির্ভর করে প্রাথমিকভাবে পৃষ্ঠের তথাকথিত অপটিক্যাল বৈশিষ্ট্যের উপর (এর কালোত্বের ডিগ্রী)।
স্ক্রিন-ভ্যাকুয়াম তাপ নিরোধকের প্রতিটি স্তর, কিছুটা আনুমানিকভাবে, রশ্মিগুলিকে ভালভাবে প্রতিফলিত করে এবং এই জাতীয় তাপ নিরোধকের একটি বহুস্তর প্যাকেজ কার্যত তাপ শোষণ এবং বিকিরণ উভয়ই দূর করে। এমনকি প্রয়োজনীয় কিছু "জানালা" (উদাহরণস্বরূপ, প্রধান ইঞ্জিন অগ্রভাগ) একটি স্ক্রিন-ভ্যাকুয়াম তাপ নিরোধক কভার দিয়ে আবৃত ছিল, কভারটি খুলতে এবং বন্ধ করার জন্য একটি স্বয়ংক্রিয় ড্রাইভ দিয়ে সজ্জিত ছিল।
যাইহোক, মহাকাশযানের অভ্যন্তরে, তাপ ক্রমাগত নির্গত হয়: এটি মহাকাশচারীদের দ্বারা নির্গত হয় এবং সমস্ত বিদ্যুত শেষ পর্যন্ত কার্যত তাপে পরিণত হয়। অতএব, মহাকাশযানের উপর দিয়ে এই তাপ নিঃসরণ করা প্রয়োজন। এই উদ্দেশ্যে, একটি বাহ্যিক রেডিয়েটর যন্ত্রের বগির প্রলেপের অংশের উপরে স্থির করা হয়েছিল, যার পৃষ্ঠটি বেশিরভাগ সূর্যের রশ্মিকে প্রতিফলিত করে এবং তীব্রভাবে বাইরের মহাকাশে তাপ বিকিরণ করে। ফলস্বরূপ, এই পৃষ্ঠটি সর্বদা ঠাণ্ডা ছিল এবং রেডিয়েটারের মাধ্যমে সঞ্চালিত কুল্যান্টটি নিবিড়ভাবে শীতল হয়েছিল।
রেডিয়েটারের মধ্য দিয়ে প্রবাহিত কুল্যান্টের পরিমাণ পরিবর্তিত হয় এবং এইভাবে তাপ মুক্তি নিয়ন্ত্রিত হয়। পাম্পের সাহায্যে, মহাকাশযানের সমস্ত বগিতে হিট এক্সচেঞ্জারের একটি বিস্তৃত সিস্টেমের মাধ্যমে কুল্যান্টকে পাম্প করা হয়েছিল।
সয়ুজ মহাকাশযানটি 18 দিন পর্যন্ত বিভিন্ন সময়কালের (স্বায়ত্তশাসিত সহ) ফ্লাইট চালিয়েছিল (মহাকাশচারী এজি নিকোলায়েভ এবং ভিআই সেবাস্তিয়ানভের সাথে সয়ুজ-9 মহাকাশযান)। দীর্ঘ সময়কাল, ব্যাপক ফ্লাইট প্রোগ্রাম এবং ফলস্বরূপ, প্রচুর বিদ্যুত খরচকারী সিস্টেমগুলির বৃহত্তর জটিলতা সোলার প্যানেল সহ একটি নতুন বিদ্যুৎ সরবরাহ ব্যবস্থা তৈরির দিকে পরিচালিত করে। দুটি সৌর প্যানেল, মহাকাশযানটি কক্ষপথে প্রবেশ করার পরে স্থাপন করা হয়েছিল, ব্যাটারি চার্জ করা সহ সমস্ত মহাকাশযান সিস্টেমে বিদ্যুৎ সরবরাহ করেছিল, যাকে বাফার ব্যাটারি বলা হয়।
আরো বেশী দক্ষ কাজসৌর ব্যাটারি কে কে ওরিয়েন্টেড (যদি সম্ভব হয়) যাতে ব্যাটারির প্লেনগুলি লম্ব হয় সূর্যরশ্মি. জাহাজটিকে একটি নির্দিষ্ট, অপেক্ষাকৃত কম ঘূর্ণন গতি (এই ফ্লাইট মোডটিকে সূর্যের উপর স্পিন বলা হয়) দেওয়া হয় এই কারণে এই অভিযোজন সাধারণত বজায় রাখা হয়। এই ক্ষেত্রে, বাফার ব্যাটারিগুলি চার্জ করা হয়, এবং আবার ফ্লাইট প্রোগ্রামের অন্যান্য বিভাগগুলি সম্পাদন করতে মহাকাশযানের অভিযোজন পরিবর্তন করা যেতে পারে।
একটি সৌর বিদ্যুৎ ব্যবস্থার কিছু সুবিধা এবং অসুবিধা সম্পর্কে কয়েকটি শব্দ বলা উচিত। প্রথমত, এই অপেক্ষাকৃত সহজ এবং নির্ভরযোগ্য সিস্টেমটি শুধুমাত্র যথেষ্ট দীর্ঘ ফ্লাইটের জন্য কার্যকর হয়, যেহেতু এর ভর ব্যবহারের সময় নির্ভর করে না। একই সময়ে, এই জাতীয় ব্যবস্থার জন্য মোটামুটি বড় স্থাপনযোগ্য প্যানেলের প্রয়োজন, যা মহাকাশযানের চালচলনকে সীমিত করে, বিশেষ করে সূর্যের দিকে অভিমুখী হওয়ার সময়কালে।
সয়ুজ মহাকাশযানের সবচেয়ে জটিল সিস্টেমে কৌশল নিয়ন্ত্রণের একটি সেট অন্তর্ভুক্ত ছিল: অরবিটাল প্যারামিটার সংশোধন, মিলনস্থল এবং ডকিং। প্রথম থেকেই, এই যানগুলি এমনভাবে ডিজাইন করা হয়েছিল যাতে একাধিক নিয়ন্ত্রণ লুপ ছিল এবং জটিল কৌশলগুলি স্বয়ংক্রিয়ভাবে বা আধা-স্বয়ংক্রিয়ভাবে সঞ্চালিত হতে পারে। এই মোডগুলি চালু করার আদেশগুলি মহাকাশচারীদের দ্বারা এবং পৃথিবী থেকে একটি কমান্ড রেডিও লিঙ্কের মাধ্যমে জারি করা যেতে পারে।
এটি, বিশেষত, সয়ুজ মহাকাশযানের অন্যান্য সিস্টেমের নিয়ন্ত্রণে প্রয়োগ করা হয় (জীবন সমর্থন, তাপ নিয়ন্ত্রণ, বিদ্যুৎ সরবরাহ, ইত্যাদি)। স্বয়ংক্রিয় সার্কিটের উপস্থিতি সিস্টেমগুলিকে নিজেরাই জটিল করে তোলে, কিন্তু বিভিন্ন প্রোগ্রাম পরিচালনা করার সময় ক্ষমতাগুলিকে প্রসারিত করে এবং পরবর্তীতে মৌলিকভাবে নতুন মহাকাশ কমপ্লেক্স তৈরি করা সম্ভব করে (প্রগতি মানবহীন কার্গো জাহাজের উপর ভিত্তি করে পরিবহন সরবরাহ ব্যবস্থা সহ স্যালিউট অরবিটাল স্পেস স্টেশন)।
মিলনস্থল এবং ডকিং সিস্টেমগুলি মৌলিকভাবে নতুন এবং জটিল হয়ে উঠেছে। মিলন এবং ডকিং অপারেশনগুলি সম্পাদন করার সময়, অনেকগুলি, বেশিরভাগ না হলেও, মহাকাশযান সিস্টেম এবং স্থল-ভিত্তিক ট্র্যাকিং, কমান্ড এবং নিয়ন্ত্রণ ব্যবস্থা অংশ নেয়। এগুলি দৃশ্যত কক্ষপথে সম্পাদিত সবচেয়ে জটিল জটিল অপারেশন। একটি সংমিশ্রণ তৈরি করতে, আপনাকে প্রথমে উভয় মহাকাশযানের কক্ষপথ নির্ধারণ করতে হবে এবং মহাকাশযানের কৌশলগুলির সময় ক্রমাগত এই ডেটা পুনরায় গণনা করতে হবে (সর্বশেষে, প্রতিটি ইঞ্জিন সক্রিয়করণ এই পরামিতিগুলিকে পরিবর্তন করে)।
এই সমস্যা সমাধানের জন্য, স্থল এবং বায়ুবাহিত নেভিগেশন এবং কম্পিউটিং সুবিধা ব্যবহার করা হয়। এই গণনার প্রধান পরিণতি হল সংশোধন নাড়ির পরামিতি নির্ধারণ। তদুপরি, যে ইঞ্জিনটি এই আবেগ প্রদান করে তা অবশ্যই কক্ষপথের একটি কঠোরভাবে সংজ্ঞায়িত বিন্দুতে, একটি কঠোরভাবে নির্দিষ্ট দিকে, একটি সুনির্দিষ্টভাবে গণনা করা সময়ে চালু করতে হবে এবং অবশেষে, ইঞ্জিনটিকে অবশ্যই একটি নির্দিষ্ট সময়ের জন্য কাজ করতে হবে। কেবলমাত্র এই ক্ষেত্রে মহাকাশযানগুলি স্বর্গীয় যান্ত্রিকতার নিয়ম অনুসারে ধীরে ধীরে একে অপরের কাছে আসতে শুরু করবে।
সাধারণত, পদ্ধতির প্রক্রিয়া চলাকালীন বেশ কয়েকটি সংশোধন প্রবণতা জারি করা হয়। এবং প্রতিবার পৃথিবীতে জটিল গণনা করা হয় গানিতিক প্রতিমাণস্বর্গীয় মেকানিক্সের আইনগুলিকে বিবেচনায় নেওয়া, যাতে প্রতিটি মহাকাশযান তার কৌশল "জানে" এবং এর জন্য সমস্ত মহাকাশযান সিস্টেমের সমন্বিত অপারেশন প্রয়োজন। মহাকাশযানটিকে অবশ্যই কক্ষপথের স্থানাঙ্ক ব্যবস্থায় গণনাকৃত অবস্থানের দিকে পরিচালিত করতে হবে, যার একটি অক্ষ পৃথিবীর কেন্দ্রের দিকে পরিচালিত হয় এবং যা কক্ষপথে মহাকাশযানের সাথে ক্রমাগত "ঘূর্ণন" করে এবং অন্য অক্ষটি বরাবর নির্দেশিত হয় মহাকাশযানের বেগ ভেক্টর।
প্রক্সিমিটি-কারেক্টিং প্রপালশন সিস্টেম চালু করার পরে, মহাকাশযানের কৌণিক অবস্থান বজায় রাখা এবং স্থিতিশীল করা প্রয়োজন। স্যুইচিং নিজেই চালু বা বন্ধ করা, সেইসাথে মূল ইঞ্জিনের অপারেশন এবং কন্ট্রোল সিস্টেমের অপারেশন, ইঞ্জিনগুলি জেট সিস্টেমনিয়ন্ত্রণ এবং অন্যান্য উপায়ে অন্যান্য সিস্টেমের সমন্বিত অপারেশন প্রয়োজন (রেডিও নিয়ন্ত্রণ এবং পর্যবেক্ষণ, তাপ নিয়ন্ত্রণ, ইত্যাদি)। স্বাভাবিকভাবেই, সমস্ত কর্ম কঠোরভাবে সিঙ্ক্রোনাইজ করা আবশ্যক।
সমস্ত কৌশলের ফলস্বরূপ, মহাকাশযানটিকে অবশ্যই গণনা করা মিটিং পয়েন্টে প্রবেশ করতে হবে এবং ডক করার জন্য, তাদের অবশ্যই একই সময়ে সেখানে পৌঁছাতে হবে না, কারণ তাদের অবশ্যই প্রতিটি স্থান "তারিখে" আসতে হবে (আমেরিকান বিশেষজ্ঞরা এটিকে " মিলনস্থল”) , তবে ছোট আপেক্ষিক গতির সাথেও। অন্য কথায়, যখন তারা গণনাকৃত বিন্দুতে পৌঁছাবে, উভয় মহাকাশযানের সমস্ত অরবিটাল প্যারামিটার কার্যত সমান হওয়া উচিত। এর পরে, মহাকাশীয় মেকানিক্সের নিয়মগুলি তাদের প্রভাবকে দুর্বল বলে মনে হয়, আপেক্ষিক গতিতে কার্যত কোন প্রভাব ফেলে না, এবং বাকি পথ, শেষ কিলোমিটার, "বিমানগুলির মতো" কাছে যাওয়া যেতে পারে, অর্থাৎ, একটি সমঅক্ষীয় অবস্থান বজায় রেখে ধীরে ধীরে অবশিষ্ট গতি, পার্শ্বীয় এবং উল্লম্ব ধ্বংস extinguishing
এই দীর্ঘ পথের শেষ কয়েক কিলোমিটারের উত্তরণ নিশ্চিত করার জন্য বেশ কয়েকটি উপায় এবং উপায় রয়েছে - কক্ষপথে মিলনের সবচেয়ে কঠিন বিভাগ। সয়ুজ মহাকাশযানে, এর জন্য বিশেষ রেডিও নির্দেশিকা সরঞ্জাম ব্যবহার করা হয়েছিল। এটি মহাকাশযানের মধ্যে দূরত্ব, পদ্ধতির গতি এবং "একে অপরের দিকে" দিক নির্ধারণ করা সম্ভব করেছে। যদি আপেক্ষিক গতি প্রথমে খুব বেশি না হয়, একটি বিশেষ কম্পিউটিং ডিভাইস ব্যবহার করে, সংশোধনমূলক ডালের পরামিতিগুলি নির্ধারণ করা হয়েছিল, যা ধীরে ধীরে মহাকাশযানটিকে একটি "সংকীর্ণ নল" তে "চালিত" করে ডকিংয়ের দিকে নিয়ে যায়।
ফ্লাইটের এই অংশে প্রক্রিয়াটি সাধারণত 15-20 মিনিট স্থায়ী হয় এবং এটি সম্ভবত পৃথিবীতে এবং মহাকাশে সবচেয়ে তীব্র। অসংখ্য গ্রাউন্ড এবং ফ্লোটিং ট্র্যাকিং পয়েন্টের সমস্ত অপারেটিং সিস্টেম ফ্লাইট কন্ট্রোল সেন্টারে শত শত অপারেটর এবং বিশেষজ্ঞদের দ্বারা পর্যবেক্ষণ করা হয়।
এইভাবে, প্রতি সেকেন্ডে কয়েকশ মিটার গতিতে একটি আপেক্ষিক (অর্থাৎ অন্য মহাকাশযানের সাথে সম্পর্কিত) একটি অরবিটাল ফ্লাইট শুরু করার পরে, মহাকাশযানটি 0.5 মিটার/সেকেন্ডের কম গতিতে তার ফ্লাইটের লক্ষ্যের কাছে পৌঁছায়। তবুও, দুটি মহাকাশযানকে সংযুক্ত করার জন্য শক শোষকের একটি সম্পূর্ণ সিস্টেম প্রয়োজন, যার প্রতিটির ওজন কয়েক টন বা এমনকি দশ টন, ক্ষতি ছাড়াই। এটি এবং মহাকাশযানকে একটি একক কাঠামোতে সংযুক্ত করার অন্যান্য কাজ ডকিং সিস্টেম দ্বারা সঞ্চালিত হয়।
সয়ুজ মহাকাশযানের জন্য ডকিং ডিভাইসের বিভিন্ন রূপ তৈরি করা হয়েছিল। প্রথম ধরনের ডকিং ইউনিট, যার সাহায্যে Soyuz-4 এবং Soyuz-5 মহাকাশযান ডক করা হয়েছিল, শুধুমাত্র মহাকাশযানের একটি অনমনীয় সংযোগ তৈরি করেছিল। মহাকাশচারী A.S. Eliseev এবং E.V. Khrunov একটি এয়ারলক হিসাবে পরিবারের বগি ব্যবহার করে, বাইরের মহাকাশের মাধ্যমে একটি মহাকাশযান থেকে অন্য মহাকাশে "স্থানান্তর" করেছেন।
পরে তৈরি করা হয়েছিল, 60 এর দশকের শেষে, নকশাটি একটি ট্রানজিশন টানেল (চিত্র 8) গঠনের সাথে জয়েন্টের একটি হারমেটিক সংযোগ নিশ্চিত করেছিল। Salyut অরবিটাল স্টেশন এবং Soyuz পরিবহন মহাকাশযানে প্রথমবারের মতো ইনস্টল করা এই ডকিং ডিভাইসটি দ্বিতীয় দশক ধরে মহাকাশে সফলভাবে পরিচালিত হয়েছে। ডকিং সিস্টেম (মহাকাশযানের সরাসরি সংযোগের সাথে জড়িত সমস্ত নিয়ন্ত্রণ সরঞ্জাম) স্বয়ংক্রিয়ভাবে কাজ করতে পারে বা দূরবর্তীভাবে নিয়ন্ত্রিত হতে পারে। এই নকশাটি প্রোগ্রেস কার্গো জাহাজ তৈরিতেও কার্যকর ছিল।

ভাত। 8. Salyut স্টেশনের সাথে সয়ুজ মহাকাশযানের ডকিংয়ের পরিকল্পনা: a - একটি প্রাথমিক যান্ত্রিক সংযোগের গঠন, b - একটি মাধ্যমিক যান্ত্রিক সংযোগের গঠন, c - প্রাথমিক যান্ত্রিক সংযোগের ব্যাঘাত, d - ট্রানজিশন হ্যাচের খোলার (1) - রিসিভিং কোন, 2 - রড, 3 - সকেট, 4 - রড হেড, 5 - ডকিং ফ্রেম লক, 6 - হ্যাচ কভার ড্রাইভ, 7 - হ্যাচ কভার, 8 - লেভেলিং লিভার)
সয়ুজ মহাকাশযান রেডিও কমপ্লেক্স অরবিটাল ফ্লাইটের সময়, কক্ষপথ থেকে অবতরণের সময় এবং অবতরণের পরে পূর্বে তালিকাভুক্ত পাঁচটি প্রধান ফাংশন (দ্বিমুখী যোগাযোগ, টেলিভিশন, ট্র্যাজেক্টরি পরিমাপ, রিমোট কন্ট্রোল, টেলিমেট্রিক নিয়ন্ত্রণ) এর কার্যকারিতা নিশ্চিত করে। মহাকাশযানে অবস্থিত এই উপায়গুলির একটি অংশ, মহাকাশচারীদের সাথে প্রায় অবিচ্ছিন্ন দ্বি-মুখী যোগাযোগ বজায় রাখা সম্ভব করে (বায়ুমন্ডলে সবচেয়ে তীব্র ব্রেকিংয়ের অঞ্চল ব্যতীত, যখন মহাকাশযানটি বৈদ্যুতিকভাবে পরিবাহী প্লাজমার একটি স্তর দ্বারা বেষ্টিত থাকে। , রেডিও পরিসরে অস্বচ্ছ)। প্যারাসুট অবতরণের সময় এবং অবতরণের পরে, রেডিও বিয়ারিং পাওয়া যায়।
আগেই উল্লিখিত হিসাবে, সয়ুজ মহাকাশযান বায়ুমণ্ডলে একটি নিয়ন্ত্রিত অবতরণ সম্পাদনকারী প্রথম দেশীয় মহাকাশযান হয়ে উঠেছে। এই কারণে, অবতরণের যথার্থতা উল্লেখযোগ্যভাবে বৃদ্ধি পেয়েছে, অনুসন্ধানটি সরলীকৃত হয়েছে এবং মহাকাশচারীদের সহায়তা আরও দক্ষ হয়ে উঠেছে, যা দীর্ঘ ফ্লাইটের পরে বিশেষত গুরুত্বপূর্ণ, অবতরণের সময় মানবদেহে বড় শারীরিক এবং মানসিক ওভারলোডের প্রভাবের পরে, যা আগে ওজনহীনতার শর্তে ওভারলোডের সম্পূর্ণ অনুপস্থিতিতে অভিযোজিত হয়েছিল।
ফ্লাইটের শেষ বিন্দুটি SA দ্বারা তৈরি হয় যখন এটি পৃথিবী স্পর্শ করে। অবতরণ ব্যবস্থার উন্নতির কারণে, পরেরটি নরম হয়ে গেছে, যা 4টি পাউডার ইঞ্জিনের সক্রিয়করণ দ্বারা নিশ্চিত করা হয়, যা প্রায় 1 মিটার উচ্চতায় একটি বিশেষ উচ্চতা মিটার থেকে একটি সংকেত দ্বারা উত্পাদিত হয়। টেকঅফ এবং অবতরণের সময়, নভোচারীদের রাখা হয় দোলনায় থাকা মহাকাশযানটি আসনের মধ্যে প্রবেশ করান এবং অর্ডার করার জন্য তৈরি করা হয় - এর দোলনাটি মহাকাশচারীর দেহের রূপ অনুসারে তৈরি করা হয়। উপরন্তু, আসন নিজেদের বিশেষ শক শোষক আছে. এই সব মহাকাশচারীদের ভারী ওভারলোড সহ্য করতে সাহায্য করে।
সয়ুজ রকেট এবং স্পেস সিস্টেম একটি সাবধানে ডিজাইন করা SAS সিস্টেম দিয়ে সজ্জিত। পরেরটি একটি হুমকিজনক পরিস্থিতির ক্ষেত্রে তথাকথিত প্রধান ইউনিটের অংশ হিসাবে লঞ্চ যান থেকে মহাকাশযানের অংশটি আলাদা করা এবং অপসারণ নিশ্চিত করে। মহাকাশযানের ক্রুদের উদ্ধার আসলে নিশ্চিত করা হয় যখন রকেট এবং স্পেস সিস্টেম লঞ্চ প্যাডে থাকে তখন থেকে কক্ষপথে প্রবেশ না করা পর্যন্ত। প্রাথমিক পর্যায়ে, লিফটটি একটি বিশেষ কঠিন প্রপেলান্ট প্রপালশন সিস্টেম দ্বারা সঞ্চালিত হয়, যা লঞ্চ গাড়ির হেড ফেয়ারিং-এ অবস্থিত, যা মহাকাশযানকে অ্যারোডাইনামিক লোড থেকে রক্ষা করে।
SAS প্রধান ইঞ্জিনের থ্রাস্ট প্রায় 800 kN। প্রপালশন সিস্টেমে একটি সাইড পুল মোটর এবং প্রায় 200 kN এর থ্রাস্ট সহ একটি স্ট্যান্ডার্ড SAS ডাম্প মোটর অন্তর্ভুক্ত রয়েছে। এর পরে, এলভি হেড ফেয়ারিং প্রকাশিত হয় (সলিড প্রপেলান্ট ইঞ্জিন ব্যবহার করে ফ্ল্যাপগুলি খোলা)। CC তারপর সহজভাবে RN থেকে আলাদা করা যেতে পারে। অধিকন্তু, সমস্ত ক্ষেত্রে, উপলব্ধ স্ট্যান্ডার্ড ল্যান্ডিং সিস্টেম সরঞ্জাম অবতরণ জন্য ব্যবহার করা হয়।
সয়ুজ মহাকাশযানের মনুষ্যবাহী ফ্লাইটের কর্মসূচি, 23 এপ্রিল, 1967 সালে ভি.এম. কোমারভ সয়ুজ-1 মহাকাশযানে শুরু করেছিলেন, এতে বোর্ডে থাকা মহাকাশযানের 39টি মহাকাশযানের ফ্লাইট (একটি উপকূল সহ) এবং 2টি মহাকাশযানের ফ্লাইট মহাকাশযান ছাড়াই ছিল। মোট, 40 টি বিভিন্ন সোভিয়েত মহাকাশচারী এবং 9 জন বিদেশী (ইন্টারকসমস প্রোগ্রামের অধীনে) প্রোগ্রামে অংশ নিয়েছিল।
Battle for the Stars-2 বইটি থেকে। মহাকাশ দ্বন্দ্ব (প্রথম পর্ব) লেখক পারভুশিন আন্তন ইভানোভিচবিকল্প-6: ইন্টারপ্ল্যানেটারি সোশ্যালিস্ট রিপাবলিকস ইউনিয়ন একবার, 80-এর দশকের গোড়ার দিকে, কসমোনটিক্স ফেডারেশনের ভাইস-প্রেসিডেন্ট বরিস নিকোলায়েভিচ চুগুনভকে জিজ্ঞাসা করা হয়েছিল যে মঙ্গল গ্রহে একটি অভিযান পাঠানো ইতিমধ্যেই সম্ভব ছিল কিনা এবং ইউএসএসআর এটি করবে কিনা। বরিস নিকোলাভিচ কঠিন
Battle for the Stars-2 বইটি থেকে। মহাকাশ দ্বন্দ্ব (দ্বিতীয় খণ্ড) লেখক পারভুশিন আন্তন ইভানোভিচপরীক্ষামূলক সয়ুজ মহাকাশ স্টেশন যখন 7K (Soyuz) মহাকাশযানকে আর শুধুমাত্র সোভিয়েত চন্দ্র কর্মসূচির অবিচ্ছেদ্য অংশ হিসাবে বিবেচনা করা হয় না, তখন তাদের তৈরি করা অরবিটাল স্টেশনগুলিতে ফ্লাইটের জন্য ব্যবহার করার সিদ্ধান্ত নেওয়া হয়েছিল। এর প্রথম ধাপ
টেক অফ 2006 বই থেকে 10 লেখক লেখক অজানাSoyuz TMA-9 একটি নতুন ক্রু এবং প্রথম মহাকাশ পর্যটককে ISS এ পৌঁছে দিয়েছে। সেপ্টেম্বরে, আরেকটি রাশিয়ান সয়ুজ মহাকাশযান আন্তর্জাতিক মহাকাশ স্টেশনে উৎক্ষেপণ করেছে। মহাকাশবিজ্ঞানের ইতিহাসে প্রথমবারের মতো একজন মহিলা আমেরিকান পর্যটক এটিতে চড়ে মহাকাশে গিয়েছিলেন।
টেক অফ 2006 12 বই থেকে লেখক লেখক অজানাপ্রথম Soyuz দুই বছরের মধ্যে Kourou থেকে উৎক্ষেপণ করবে। 16 নভেম্বর, রাশিয়ান সরকার কসমোড্রোম থেকে লঞ্চের জন্য সয়ুজ লঞ্চ যানের উন্নয়ন ও নির্মাণে সহযোগিতার বিষয়ে রাশিয়া ও ফ্রান্সের মধ্যে চুক্তি অনুমোদনের জন্য একটি বিল স্টেট ডুমাকে পেশ করেছে। ফ্রান্স
ট্যাঙ্কের ইতিহাস বই থেকে (1916 - 1996) লেখক শমেলেভ ইগর পাভলোভিচসোভিয়েত ইউনিয়ন 1919 সালের শরত্কালে, আরএসএফএসআর-এর সামরিক শিল্প কাউন্সিল রেনল্ট মডেলের উপর ভিত্তি করে গার্হস্থ্য ট্যাঙ্কগুলির উত্পাদন শুরু করার সিদ্ধান্ত নিয়েছিল। পছন্দটি এলোমেলো ছিল না এবং সেই সময়ে যুক্তিসঙ্গত বলে মনে হয়েছিল। 1919 সালের শেষের দিকে, ধরা পড়া রেনল্টগুলির মধ্যে একটিকে সোরমোভো প্ল্যান্টে আনা হয়েছিল। তাকে
টেকঅফ 2008 01-02 বই থেকে লেখক লেখক অজানারাশিয়ান সয়ুজ 14 ডিসেম্বর মস্কোর সময় 16.17 এ বাইকোনুর কসমোড্রোমের সাইট নং 31 এর লঞ্চার নং 6 থেকে কানাডিয়ান রাডারটি চালু করেছে। রাশিয়ান-ইউরোপীয় কোম্পানি স্টারসেম দ্বারা কমিশন করা Roscosmos লঞ্চ ক্রুরা সয়ুজ-FG লঞ্চ ভেহিকেল চালু করেছে। একটি উপরের পর্যায়
স্পেসশিপ বই থেকে লেখক ববকভ ভ্যালেন্টিন নিকোলাভিচপরিবহন মহাকাশযান "Soyuz T" মহাকাশযান "Soyuz" এর নকশার শুরু থেকে 20 বছরেরও বেশি সময় কেটে গেছে। স্বাভাবিকভাবেই, এই সময়ে, সাধারণভাবে প্রযুক্তি এবং বিশেষ করে মহাকাশ প্রযুক্তি, এর অগ্রণী শাখা হিসাবে, অনেক এগিয়ে গেছে। অন-বোর্ড সিস্টেম মহাকাশযানে ব্যাপকভাবে ব্যবহৃত হয়েছে।
Aviation 2000 03 বই থেকে লেখক লেখক অজানাহালকা বহুমুখী হেলিকপ্টার এমআই-২ এফিম গর্ডন, দিমিত্রি কোমিসারভ (মস্কো) ছবি সহ বি. ভদোভেনকো/ভি. কুলিকভ/বরিস ভদোভেনকো/ভিক্টর কুলিকভ আর্কাইভের আর্কাইভ ৫০ দশকের শেষের দিকে, হালকা হেলিকপ্টার এমআই-১ ব্যাপকভাবে ছড়িয়ে পড়ে। AI-26V পিস্টন ইঞ্জিন সহ সশস্ত্র বাহিনী এবং ইউএসএসআর এর জাতীয় অর্থনীতিতে ব্যবহৃত হয়
The Trajectory of Life বইটি থেকে [চিত্র সহ] লেখক ফিওকটিস্টভ কনস্ট্যান্টিন পেট্রোভিচ"সয়ুজ" এটি 1959 সালের গ্রীষ্মে শুরু হয়েছিল। "ভোস্টক" এর কাজের মাঝখানে। কর্মশালাগুলি ডিসেন্ট যানবাহন এবং যন্ত্রের বগিগুলির প্রথম দেহ তৈরি করা শুরু করে, নকশা বিভাগগুলি সম্পূর্ণ ক্ষমতায় কাজ করছিল, প্রযুক্তিগত ডকুমেন্টেশন প্রস্তুত করা হচ্ছিল, ইলেকট্রিশিয়ান
মোটরসাইকেল বই থেকে। ঐতিহাসিক সিরিজ টিএম, 1989 লেখক ম্যাগাজিন "প্রযুক্তি-যুব"1960 সালে, মহাকাশের ব্যবহারিক অনুসন্ধানের শুরুতে, সের্গেই পাভলোভিচ কোরোলেভের নেতৃত্বে ওকেবি অরবিটাল সমাবেশের জন্য উপায় তৈরির জন্য প্রস্তাব তৈরি করেছিল। এটি জোর দেওয়া হয়েছিল, বিশেষ করে, সবচেয়ে গুরুত্বপূর্ণ কাজগুলির মধ্যে একটি হল কক্ষপথে মহাকাশযানের মিলন এবং সমাবেশ। কৃত্রিম উপগ্রহপৃথিবী এটি উল্লেখ করা হয়েছে যে স্থায়ীভাবে চালিত মানব স্যাটেলাইট (ক্রু পরিবর্তন, খাদ্য বিতরণ, বিশেষ সরঞ্জামইত্যাদি) নিয়মিত মিলন এবং কক্ষপথে ডকিংয়ের সাথে যুক্ত; এই বিষয়ে অর্জিত অভিজ্ঞতা প্রয়োজনে, মানব স্যাটেলাইট এবং মহাকাশযানের ক্রুদের সফলভাবে উদ্ধার করার অনুমতি দেবে।
"ভোস্টক" এবং "ভোসখড" জাহাজগুলি সীমিত পরিসরে বৈজ্ঞানিক ও প্রযুক্তিগত কাজ করে, প্রধানত পরীক্ষামূলক গবেষণা। নতুন সয়ুজ সিরিজের মহাকাশযানটি তুলনামূলকভাবে দীর্ঘ ফ্লাইট, কৌশল, মিলন এবং নিম্ন-পৃথিবী কক্ষপথে ডক করার জন্য ডিজাইন করা হয়েছে।
10 মার্চ, 1962-এ, কোরোলেভ "পৃথিবী স্যাটেলাইট কক্ষপথে মহাকাশযান একত্রিত করার জন্য জটিল (থিম "সয়ুজ") শিরোনামের একটি প্রযুক্তিগত প্রসপেক্টাস অনুমোদন করেন। কক্ষপথে ডকিং এবং সমাবেশ পরীক্ষা করার জন্য বোর্ডে নভোচারী-"অ্যাসেম্বলার"-এর সাথে ভস্টক-7 মহাকাশযানের একটি পরিবর্তন ব্যবহার করার সম্ভাবনার ন্যায্যতা এই নথিটি প্রথম। এই উদ্দেশ্যে, জাহাজটি মিলন এবং ডকিং সিস্টেমের পাশাপাশি একটি মাল্টিপল-অ্যাক্টিভেশন প্রপালশন সিস্টেম এবং বার্থিং এবং ওরিয়েন্টেশন মাইক্রোমোটরগুলির একটি সিস্টেমের সাথে সজ্জিত হওয়ার কথা ছিল। Vostok-7 তিনটি অভিন্ন রকেট ব্লক সমন্বিত একটি কৃত্রিম আর্থ স্যাটেলাইটের চারপাশে কক্ষপথে একটি মহাকাশ রকেট একত্রিত করতে ব্যবহার করা যেতে পারে। এই জাতীয় একটি মহাকাশ রকেটের সাহায্যে, এক থেকে তিনজনের ক্রু নিয়ে একটি বিশেষ এল 1 মহাকাশযান ব্যবহার করে চাঁদের চারদিকে উড়ে যাওয়ার প্রস্তাব দেওয়া হয়েছিল।
কিছু সময় পরে, যৌথ উদ্যোগ দ্বারা অনুমোদিত "আর্থ স্যাটেলাইট কক্ষপথে মহাকাশযানের সমাবেশ" শিরোনামে একটি দ্বিতীয় প্রসপেক্টাস হাজির। কোরোলেভ 10 মে, 1963 তারিখে। এটিতে, থিম "ইউনিয়ন" ইতিমধ্যে স্পষ্টভাবে এবং বিশ্বাসযোগ্যভাবে শোনাচ্ছে। নথির মূল বস্তুটি হল একটি জটিল যা ক্রমানুসারে চালু করা হয় এবং ট্যাঙ্কার জাহাজের কক্ষপথের উপরের স্তরে এর রিফুয়েলিং এবং সয়ুজ এর জন্য ডক করা হয়।
প্রসপেক্টাস দুটি প্রধান লক্ষ্য নির্ধারণ করেছে: কক্ষপথে ডকিং এবং সমাবেশের কাজ করা এবং একটি মনুষ্যবাহী মহাকাশযান নিয়ে চাঁদের চারপাশে উড়ে যাওয়া। কোরোলেভের মতে, এই দুটি কাজের সাথে সম্পর্কিত সিদ্ধান্তগুলি মহাকাশ অনুসন্ধানে ইউএসএসআর-এর অগ্রাধিকার নিশ্চিত করেছে।
L1 মহাকাশযান দ্বারা চাঁদের একটি সরাসরি ফ্লাইবাই বিকাশের সাথে সম্পর্কিত, সয়ুজ প্রোগ্রামের উদ্দেশ্য ছিল জাহাজ থেকে জাহাজে ক্রু সদস্যদের পরবর্তী স্থানান্তরের সাথে মহাকাশযানের মিলন এবং ডকিং পরীক্ষা করা। 1965 সালে স্বাক্ষরিত সয়ুজের প্রাথমিক নকশাটি ইতিমধ্যে জাহাজের জন্য নতুন কৌশলগত এবং প্রযুক্তিগত প্রয়োজনীয়তা প্রতিফলিত করেছে। 28 নভেম্বর, 1966 সালে কসমস-133 স্যাটেলাইট উৎক্ষেপণের মাধ্যমে সয়ুজ-এর একটি মানবহীন সংস্করণে পরীক্ষা শুরু হয়। 1966 সালের ডিসেম্বরে একটি মনুষ্যবিহীন সয়ুজ উৎক্ষেপণের একটি ব্যর্থ প্রচেষ্টার পর, যা লঞ্চ যানের ব্যর্থতা এবং লঞ্চে জরুরি উদ্ধার ব্যবস্থা সক্রিয় করার ফলে শেষ হয়েছিল, 7 ফেব্রুয়ারি, 1967-এ, দ্বিতীয় মানববিহীন সয়ুজ (কসমস-140) তৈরি হয়েছিল। আরাল সাগরে একটি অরবিটাল ফ্লাইট অবতরণ..
Soyuz-1-এ প্রথম মনুষ্যবাহী ফ্লাইটটি 23-24 এপ্রিল, 1967 সালে পাইলট-কসমোনট V.M. কোমারভ, তবে, অবতরণের সময় প্যারাসুট সিস্টেমের ব্যর্থতার কারণে, ফ্লাইটটি বিপর্যয়ের মধ্যে শেষ হয়েছিল।
প্রথম স্বয়ংক্রিয় ডকিং 30 সেপ্টেম্বর, 1967 তারিখে মানববিহীন উপগ্রহ কসমস-186 এবং -187 দ্বারা সঞ্চালিত হয়েছিল এবং 15 এপ্রিল, 1968 সালে কসমস-212 এবং কসমস-213 উপগ্রহ দ্বারা পুনরাবৃত্তি হয়েছিল। 28 আগস্ট, 1968 সালে সয়ুজ মহাকাশযানের (উপগ্রহ কসমস-238) মনুষ্যবিহীন ফ্লাইটের পর, নিয়মিত সয়ুজ ফ্লাইট শুরু হয়।
প্রকৃতপক্ষে, সয়ুজ প্রোগ্রামের কাজ - মহাকাশের মধ্য দিয়ে নভোচারীদের যাতায়াতের সাথে মনুষ্যবাহী মহাকাশযানের ডকিং - 16 জানুয়ারী, 1969 সালে মহাকাশচারীদের সাথে সয়ুজ-4 এবং -5 মহাকাশযানের ফ্লাইটের সময় সম্পন্ন হয়েছিল। শাতালভ, বি.ভি. ভলিনোভ, এ.এস. এলিসিভ এবং ই.ভি. খরুনভ। অবশিষ্ট সয়ুজ মহাকাশযানকে গঠনের ফ্লাইট এবং দীর্ঘমেয়াদী ফ্লাইটে প্রযুক্তিগত পরীক্ষা-নিরীক্ষা করার জন্য পুনরায় ব্যবহার করা হয়েছিল।
অক্টোবর 1969 সালে, সয়ুজ প্রোগ্রামের অধীনে, তিনটি মহাকাশযানের একটি গ্রুপ ফ্লাইট হয়েছিল - সয়ুজ-6, সয়ুজ-7 এবং সয়ুজ-8 সাতজন মহাকাশচারী নিয়ে। ন্যূনতম ব্যবধানে একটি কসমোড্রোম থেকে পরপর তিনটি মহাকাশযান উৎক্ষেপণের ঘটনাটি ছিল একটি উল্লেখযোগ্য প্রযুক্তিগত অর্জন। গ্রুপ ফ্লাইট নিয়ন্ত্রণে এই পরীক্ষায় অর্জিত অভিজ্ঞতাটি অত্যন্ত গুরুত্বপূর্ণ ছিল। তিনটি মহাকাশযান, একটি স্থল-ভিত্তিক কমান্ড এবং পরিমাপ কমপ্লেক্স, গবেষণা জাহাজের একটি গ্রুপ এবং মোলনিয়া-1 যোগাযোগ উপগ্রহ সমন্বিত একটি সম্পূর্ণ সিস্টেম মসৃণভাবে পরিচালিত হয়।
সয়ুজ -6 বোর্ডে একটি অনন্য পরীক্ষা চালানো হয়েছিল - মহাকাশে ঢালাই। এটি একটি বিশেষভাবে ডিজাইন করা ভলকান ওয়েল্ডিং ইনস্টলেশনে উত্পাদিত হয়েছিল। ভলক্যানের ওয়েল্ডিং ইউনিটটি অরবিটাল বগিতে মাউন্ট করা হয়েছিল এবং রিমোট কন্ট্রোলটি জাহাজের কেবিনে অবস্থিত ছিল।
অরবিটাল কম্পার্টমেন্টটি চাপযুক্ত ছিল, এবং ঢালাই তিনটি উপায়ে সঞ্চালিত হয়েছিল: সংকুচিত চাপ, ইলেক্ট্রন মরীচি এবং ব্যবহারযোগ্য ইলেক্ট্রোড। পরীক্ষা চলাকালীন, পাতলা শীট স্টেইনলেস স্টিল এবং টাইটানিয়ামের ঢালাই, স্টেইনলেস স্টীল, টাইটানিয়াম এবং অ্যালুমিনিয়াম কাটা এবং অ ধাতব পদার্থের প্রক্রিয়াকরণ করা হয়েছিল। তারপরে অরবিটাল কম্পার্টমেন্টটি আবার সিল করা হয়েছিল, নভোচারীরা ইনস্টলেশনটি ভেঙে ফেলেন, নমুনাগুলি ডিসেন্ট মডিউলে স্থানান্তরিত করে এবং পরবর্তীতে সেগুলি পৃথিবীতে পৌঁছে দেয়। সফল পরীক্ষা মহাকাশে নির্মাণ এবং ইনস্টলেশন কাজের জন্য সম্ভাবনা উন্মুক্ত করেছে।
1 জুন, 1970-এ, নতুন সয়ুজ, নবম, চালু হয়। এই ফ্লাইট মহাকাশবিজ্ঞানের আরও বিকাশের জন্য অমূল্য উপাদান সরবরাহ করেছিল। মানবদেহে দীর্ঘমেয়াদী মহাকাশ ফ্লাইটের কারণগুলির প্রভাবের চিকিত্সা এবং জৈবিক গবেষণাগুলি বিশেষত মূল্যবান ছিল।
জাহাজ কমান্ডার এ.জি. নিকোলাভ, যিনি তার দ্বিতীয় মহাকাশ ফ্লাইট করেছিলেন এবং ফ্লাইট ইঞ্জিনিয়ার ভিআই সেবাস্তিয়ানভ তখন একটি মহাকাশ ফ্লাইটের সময়কালের জন্য একটি বিশ্ব রেকর্ড তৈরি করেছিলেন। তারা 424 ঘন্টার জন্য নিম্ন-পৃথিবী কক্ষপথে কাজ করেছিল। ফ্লাইট প্রোগ্রামটি মহাকাশে স্বায়ত্তশাসিত নেভিগেশন এবং পৃথিবীর কাছাকাছি মহাকাশে বৈজ্ঞানিক গবেষণার অনেক পরীক্ষায় পূর্ণ ছিল।
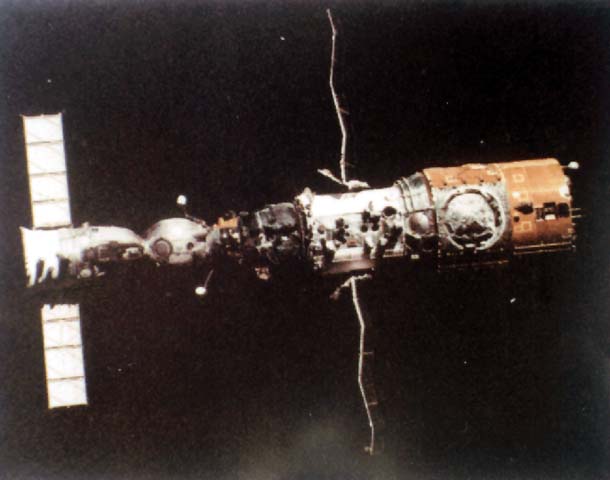
সয়ুজ মহাকাশযানটি আকারে চিত্তাকর্ষক। এর দৈর্ঘ্য প্রায় 8 মিটার, এর বৃহত্তম ব্যাস প্রায় 3 মিটার, লঞ্চের আগে এর ওজন প্রায় 7 টন। জাহাজের সমস্ত বগিগুলি বাইরের দিকে একটি বিশেষ তাপ-অন্তরক "কম্বল" দিয়ে আবৃত থাকে যা কাঠামো এবং সরঞ্জামগুলিকে সূর্যে অতিরিক্ত গরম হওয়া এবং ছায়ায় খুব বেশি শীতল হওয়া থেকে রক্ষা করে।
জাহাজের তিনটি বগি রয়েছে: অরবিটাল, ইন্সট্রুমেন্টেশন এবং অ্যাসেম্বলি মডিউল এবং ডিসেন্ট মডিউল। অরবিটাল কম্পার্টমেন্টটি একটি নলাকার সন্নিবেশ দ্বারা সংযুক্ত দুটি গোলার্ধের মতো আকৃতির। জাহাজের রেডিও সিস্টেমের বড় এবং ছোট অ্যান্টেনা, টেলিভিশন ক্যামেরা এবং অন্যান্য যন্ত্রপাতি অরবিটাল কম্পার্টমেন্টের বাইরের পৃষ্ঠে ইনস্টল করা আছে।
অরবিটাল কম্পার্টমেন্ট হল যেখানে নভোচারীরা তাদের অরবিটাল ফ্লাইটের সময় কাজ করে এবং বিশ্রাম করে। বৈজ্ঞানিক সরঞ্জাম, ক্রু বার্থ এবং বিভিন্ন গৃহস্থালী যন্ত্রপাতি এখানে অবস্থিত। বগির উপরের গোলার্ধে একটি ফ্রেম রয়েছে যার উপর ডকিং ইউনিট ইনস্টল করা আছে এবং জাহাজে স্থানান্তরের জন্য একটি হ্যাচ রয়েছে যার সাথে সয়ুজ ডক করা হয়েছে।
একটি বৃত্তাকার হ্যাচ অরবিটাল কম্পার্টমেন্টকে ডিসেন্ট মডিউলের সাথে সংযুক্ত করে। এলএ গিলবার্গ তার বইয়ে লিখেছেন, "অন্তর্ভুক্ত গাড়িটির একটি বিভাগীয়-শঙ্কুকার আকৃতি রয়েছে, যা একটি হেডলাইটের স্মরণ করিয়ে দেয়।" - এই আকৃতি, মাধ্যাকর্ষণ কেন্দ্রের একটি নির্দিষ্ট অবস্থান সহ, ডিভাইসটিকে এরোডাইনামিক গুণমান দেয়; বায়ুমণ্ডলে উড়ে যাওয়ার সময়, একটি অ্যারোডাইনামিক লিফ্ট বল দেখা দেয়, যা অনুদৈর্ঘ্য অক্ষের চারপাশে ডিভাইসটিকে ঘুরিয়ে নিয়ন্ত্রিত হয়। এটি একটি নিয়ন্ত্রিত বংশধরের জন্য অনুমতি দেয় - 3-4 ইউনিটে ওভারলোড হ্রাস করে এবং উল্লেখযোগ্যভাবে অবতরণ সঠিকতা বৃদ্ধি করে।
একটি টেকসই তাপ-প্রতিরক্ষামূলক আবরণ ডিসেন্ট গাড়ির বাইরের পৃষ্ঠে প্রয়োগ করা হয়; ডিভাইসের নীচের অংশ, যা অবতরণের সময় বাতাসের মধ্য দিয়ে কেটে যায় এবং অ্যারোডাইনামিক গরম করার জন্য সবচেয়ে বেশি সংবেদনশীল, একটি বিশেষ তাপ ঢাল দিয়ে আবৃত থাকে, যা প্যারাসুট খোলার পরে ফেলে দেওয়া হয় যাতে অবতরণের আগে নভোচারীদের কেবিন সহজতর হয়। একই সময়ে, নরম-ল্যান্ডিং পাউডার ইঞ্জিনগুলি, একটি পর্দা দিয়ে আবৃত, খোলা, যা পৃথিবীর সাথে যোগাযোগের ঠিক আগে চালু করে এবং অবতরণের সময় শককে নরম করে।
ডিসেন্ট গাড়িতে তাপ-প্রতিরোধী কাঁচের দুটি জানালা এবং অরবিটাল কম্পার্টমেন্টে যাওয়ার জন্য একটি হ্যাচ রয়েছে। বাইরে একটি অপটিক্যাল দৃশ্য রয়েছে, যা মহাকাশচারীদের পক্ষে নিজেদের অভিমুখী করা সহজ করে তোলে এবং মুরিং এবং ডকিংয়ের সময় তাদের অন্যান্য মহাকাশযান পর্যবেক্ষণ করতে দেয়। ডিসেন্ট গাড়ির পরিধি বরাবর নীচের অংশে ডিসেন্ট কন্ট্রোল সিস্টেমের ছয়টি ইঞ্জিন রয়েছে, যা জাহাজটি পৃথিবীতে ফিরে আসার সময় ব্যবহার করা হয়। এই ইঞ্জিনগুলি ল্যান্ডারটিকে এমন একটি অবস্থানে ধরে রাখতে সাহায্য করে যা এটি এর এরোডাইনামিক বৈশিষ্ট্যগুলির সুবিধা নিতে দেয়।
ডিসেন্ট গাড়ির শীর্ষে প্রধান এবং সংরক্ষিত প্যারাসুট সহ কম্পার্টমেন্ট রয়েছে।"
একটি ছোট শঙ্কুযুক্ত "স্কার্ট" সহ নলাকার ইন্সট্রুমেন্টেশন বগিটি ডিসেন্ট মডিউলে ডক করা হয়েছে এবং জাহাজের বেশিরভাগ সরঞ্জাম এবং এর প্রপালশন সিস্টেমগুলিকে মিটমাট করার জন্য ডিজাইন করা হয়েছে।
কাঠামোগতভাবে, বগিটি তিনটি বিভাগে বিভক্ত: ট্রানজিশন, ইন্সট্রুমেন্টেশন এবং এগ্রিগেট। উপকরণ বিভাগটি একটি সিল সিলিন্ডার। এটিতে রেডিও যোগাযোগ এবং রেডিও টেলিমেট্রি সরঞ্জাম, ওরিয়েন্টেশন এবং গতি নিয়ন্ত্রণ ব্যবস্থার জন্য যন্ত্র এবং তাপ নিয়ন্ত্রণ এবং পাওয়ার সাপ্লাই সিস্টেমের কিছু ইউনিট রয়েছে। অন্য দুটি বিভাগ সিল করা হয় না.
ইন্সট্রুমেন্টেশন কম্পার্টমেন্টে জাহাজের প্রধান প্রপালশন সিস্টেম রয়েছে, যা কক্ষপথে চালচলন এবং অবতরণের সময় ব্রেক করার জন্য ব্যবহৃত হয়।
এটি দুটি শক্তিশালী তরল রকেট ইঞ্জিন নিয়ে গঠিত। তাদের মধ্যে একটি প্রধান, অন্যটি ব্যাকআপ। এই ইঞ্জিনগুলির সাহায্যে, জাহাজটি অন্য কক্ষপথে যেতে পারে, অরবিটাল স্টেশন থেকে দূরে যেতে বা সরে যেতে পারে এবং ডিসেন্ট ট্রাজেক্টোরিতে যাওয়ার জন্য ধীরগতিতে যেতে পারে। কক্ষপথে ব্রেক করার পরে, জাহাজের বগিগুলি একে অপরের থেকে পৃথক হয়ে যায়। অরবিটাল এবং ইন্সট্রুমেন্ট কম্পার্টমেন্টগুলি বায়ুমণ্ডলে জ্বলে ওঠে এবং ডিসেন্ট মডিউল একটি নির্দিষ্ট অবতরণ এলাকায় অবতরণ করে। পৃথিবীতে যখন 9-10 কিলোমিটার বাকি থাকে, তখন এটি ট্রিগার করে প্যারাসুট সিস্টেম. প্রথমে, ব্রেকিং প্যারাসুটটি খোলে এবং তারপরে প্রধানটি। এটিতে ডিভাইসটি একটি মসৃণ বংশদ্ভুত করে। এক মিটার উচ্চতায় অবতরণের ঠিক আগে, নরম অবতরণ ইঞ্জিনগুলি চালু করা হয়।
থ্রাস্টার সিস্টেমে 14টি মুরিং এবং ওরিয়েন্টেশন থ্রাস্টার এবং 8টি ফাইন থ্রাস্ট থ্রাস্টার রয়েছে। ইন্সট্রুমেন্টেশন বগিতে তাপ নিয়ন্ত্রণ ব্যবস্থার হাইড্রোলিক ইউনিট, জ্বালানী ট্যাঙ্ক এবং প্রেসারাইজেশন সিস্টেমের বল সিলিন্ডারও রয়েছে। নির্বাহী সংস্থা, পাওয়ার সাপ্লাই সিস্টেমের ব্যাটারি। সোলার প্যানেলও বিদ্যুতের উৎস। প্রায় 9 বর্গ মিটারের একটি দরকারী এলাকা সহ এই ব্যাটারির দুটি প্যানেল ইন্সট্রুমেন্টেশন বগিতে বাহ্যিকভাবে মাউন্ট করা হয়েছে। ব্যাটারির প্রান্তে লাল, সবুজ এবং রয়েছে সাদা ফুলগুলো, যা মুরিং এবং জাহাজ ডক করার সময় নেভিগেট করতে সাহায্য করে।
থার্মাল কন্ট্রোল সিস্টেমের একটি ফিনড রেডিয়েটর-ইমিটারও বাইরে ইনস্টল করা আছে, যা জাহাজের অতিরিক্ত তাপকে মহাকাশে সরিয়ে ফেলার অনুমতি দেয়। ইন্সট্রুমেন্টেশন বগিতে অনেকগুলি অ্যান্টেনা রয়েছে - সংক্ষিপ্ত এবং অতি-শর্ট তরঙ্গে জাহাজ এবং পৃথিবীর মধ্যে রেডিওটেলিফোন যোগাযোগ, একটি রেডিও টেলিমেট্রি সিস্টেম, ট্র্যাজেক্টরি পরিমাপ এবং ওরিয়েন্টেশন এবং গতি নিয়ন্ত্রণ ব্যবস্থার জন্য সেন্সর।
সয়ুজ মহাকাশযান এবং স্যালিউট স্টেশনগুলি ব্যবহারের অভিজ্ঞতায় দেখা গেছে যে কেবল স্টেশনগুলির অপারেশনের সময়কাল বাড়ানো, প্রোগ্রামগুলি এবং গবেষণার পরিধি বাড়ানোর জন্য নয়, পরিবহনের ক্ষমতা বাড়ানোর জন্যও কক্ষপথের কমপ্লেক্সগুলির উন্নতি করা প্রয়োজন। জাহাজ, ক্রু নিরাপত্তা বৃদ্ধি, এবং কর্মক্ষম বৈশিষ্ট্য উন্নত.
এই সমস্যাগুলি সমাধানের জন্য, সয়ুজ তৈরি করা হয়েছিল নতুন জাহাজ- "সয়ুজ টি"। আসল নকশা সমাধানগুলি ক্রু আকারকে তিনজনে বাড়ানো সম্ভব করেছে। জাহাজটি নতুন অনবোর্ড সিস্টেম সহ সজ্জিত ছিল কম্পিউটিং জটিল, একটি প্রপালশন সিস্টেম, সৌর প্যানেল, এবং স্বায়ত্তশাসিত ফ্লাইটের জন্য একটি লাইফ সাপোর্ট সিস্টেমের সাথে মিলিত।
ডিজাইনাররা উচ্চ নির্ভরযোগ্যতা এবং ফ্লাইট নিরাপত্তার দিকে বিশেষ মনোযোগ দিয়েছেন। জাহাজটি স্বয়ংক্রিয় এবং ম্যানুয়াল মোডে নিয়ন্ত্রণের অনুমতি দেয়, ডিসেন্ট বিভাগ সহ, এমনকি কক্ষপথে অবতরণকারী যানের চাপের মতো একটি গুরুতর গণনা করা জরুরি পরিস্থিতিতেও। স্টেশনের অংশ হিসাবে সয়ুজ টি ফ্লাইটের সময়কাল 180 দিনে বাড়ানো হয়েছিল।
এই সমস্ত নতুন প্রযুক্তিগত সমাধানগুলি মহাকাশচারী V. Dzhanibekov এবং V. Savinykh-এর Salyut-7-এ উড্ডয়নের সময় সম্পূর্ণরূপে নিজেদেরকে ন্যায্যতা দিয়েছিল, যা মুক্ত প্রবাহে ছিল। ডকিংয়ের পরে, জাহাজের সংস্থান ক্রুদের স্টেশনে পুনরুদ্ধার মেরামত করতে সক্ষম করে। আরেকটি কম আকর্ষণীয় উদাহরণ হল মহাকাশচারী এল. কিজিম এবং ভি. সলোভিভের মির স্টেশন থেকে Salyut-7 এবং 400 কিলোগ্রাম পর্যন্ত ওজনের একটি কার্গো নিয়ে ফিরে যাওয়া।
সয়ুজ টি মহাকাশযানের প্রয়োজনীয় উন্নতির জন্য একটি স্থায়ী অরবিটাল কমপ্লেক্স তৈরির লক্ষ্যে স্পেস প্রোগ্রামের আরও উন্নয়ন। ডেভেলপারদের মীর স্টেশনের সাথে জাহাজের সামঞ্জস্যতা নিশ্চিত করা, এর শক্তির ক্ষমতা বৃদ্ধি এবং অন-বোর্ড সিস্টেমের উন্নতি করার কাজটির মুখোমুখি হয়েছিল।
যেমন I. Minyuk "Aviation and Cosmonautics" ম্যাগাজিনে লিখেছেন: "মহাকাশ যানের শক্তি বাড়ানোর প্রয়োজন এই কারণে যে সয়ুজ টি মহাকাশযান একটি উচ্চতায় একটি কক্ষপথে শুধুমাত্র তিন জনের একটি ক্রুকে সরবরাহ নিশ্চিত করেছে। প্রায় 300 কিলোমিটার। কিন্তু স্টেশনের স্থিতিশীল কক্ষপথ 350 কিলোমিটারের উপরে অবস্থিত।
জাহাজের "শুষ্ক" ওজন কমিয়ে, প্যারাসুট সিস্টেমের জন্য হালকা, উচ্চ-শক্তির উপাদান এবং জরুরি উদ্ধার ব্যবস্থার জন্য একটি নতুন প্রপালশন সিস্টেম ব্যবহার করে একটি সমাধান পাওয়া গেছে। এটি মীর স্টেশনের সাথে তিন-সিটার সয়ুজ টিএম মহাকাশযানের ডকিং উচ্চতা 350-400 কিলোমিটারে বৃদ্ধি করা এবং সরবরাহকৃত পণ্যসম্ভারের ভর বৃদ্ধি করা সম্ভব করেছে।
একই সময়ে, পৃথিবীর সাথে ক্রু যোগাযোগের জন্য রেডিও কমিউনিকেশন, কৌণিক বেগ মিটার, জ্বালানী মজুদ সঞ্চয়স্থানযুক্ত একটি প্রপালশন সিস্টেম, সেইসাথে মহাকাশচারীদের জন্য তাপ-প্রতিরক্ষামূলক পোশাক সহ এর অনবোর্ড সিস্টেমগুলি উন্নত করা হচ্ছিল। এটি লক্ষ করা উচিত যে সয়ুজ টিএম, অরবিটাল কমপ্লেক্সের অংশ হিসাবে, স্টেশনের কিছু ফাংশন সংরক্ষণ করতে পারে। এইভাবে, এটি কক্ষপথের প্রয়োজনীয় অভিমুখীকরণ এবং আরোহণ করতে সক্ষম, বিদ্যুৎ সরবরাহ প্রদান করে এবং এর তাপ নিয়ন্ত্রণ ব্যবস্থা অরবিটাল কমপ্লেক্সে উৎপন্ন অতিরিক্ত তাপ নিষ্কাশন করতে সক্ষম।"
সয়ুজের ভিত্তিতে, আরেকটি মহাকাশযান তৈরি করা হয়েছিল যা দীর্ঘমেয়াদী অরবিটাল স্টেশনগুলির কার্যকারিতা নিশ্চিত করে - এটি হল অগ্রগতি। তাই নামকরণ করা হয়েছে
নিষ্পত্তিযোগ্য স্বয়ংক্রিয় কার্গো পরিবহন মহাকাশযান। রিফুয়েলিং এবং লোড করার পরে এর ওজন 7 টনের চেয়ে সামান্য বেশি।
প্রোগ্রেস স্বয়ংক্রিয় কার্গো মহাকাশযানটি স্টেশনের প্রপালশন সিস্টেমে জ্বালানি সরবরাহের জন্য স্যালিউট অরবিটাল স্টেশনগুলিতে বিভিন্ন পণ্যসম্ভার এবং জ্বালানী সরবরাহ করার জন্য ডিজাইন করা হয়েছে।
যদিও এটি অনেক উপায়ে সয়ুজের সাথে সাদৃশ্যপূর্ণ, তবে এর ডিজাইনে উল্লেখযোগ্য পার্থক্য রয়েছে। এই জাহাজটিও তিনটি বগি নিয়ে গঠিত, কিন্তু তাদের উদ্দেশ্য হল... অতএব, নকশা ভিন্ন. কার্গো জাহাজ পৃথিবীতে ফিরে আসা উচিত নয়. স্বাভাবিকভাবেই, এটি একটি ডিসেন্ট মডিউল অন্তর্ভুক্ত করে না। এর কার্য সম্পাদন করার পরে, এটি অরবিটাল স্টেশন থেকে আনডক হয়, সেই অনুযায়ী ভিত্তিক হয়, ব্রেকিং ইঞ্জিনটি চালু হয় এবং ডিভাইসটি নকশা এলাকার উপরে বায়ুমণ্ডলের ঘন স্তরগুলিতে প্রবেশ করে। প্রশান্ত মহাসাগরএবং অস্তিত্ব বন্ধ.
একটি ডিসেন্ট মডিউলের পরিবর্তে, জ্বালানী পরিবহনের জন্য একটি বগি রয়েছে - জ্বালানী এবং অক্সিডাইজার, এবং অগ্রগতিতে অরবিটাল বগিটি একটি কার্গো বগিতে পরিণত হয়েছে। এটি খাদ্য এবং জল সরবরাহ, বৈজ্ঞানিক সরঞ্জাম এবং বিভিন্ন অরবিটাল স্টেশন সিস্টেমের প্রতিস্থাপন ইউনিট কক্ষপথে বহন করে। এই পুরো কার্গোর ওজন দুই টনের বেশি।
প্রগ্রেসের যন্ত্র এবং কম্পোনেন্ট কম্পার্টমেন্ট সয়ুজ মহাকাশযানের অনুরূপ বগির অনুরূপ। তবে এর মধ্যেও কিছু পার্থক্য রয়েছে। সর্বোপরি, "প্রগতি" একটি স্বয়ংক্রিয় জাহাজ, এবং সেইজন্য এখানে সমস্ত সিস্টেম এবং সমাবেশগুলি শুধুমাত্র স্বাধীনভাবে বা পৃথিবীর কমান্ডের অধীনে কাজ করে।
ম্যানড কার্গো জাহাজ ক্রমাগত উন্নত করা হচ্ছে. 1987 সাল থেকে, মহাকাশচারীদের অরবিটাল স্টেশনে নিয়ে যাওয়া হয়েছে এবং একটি পরিবর্তিত সয়ুজ টিএম মহাকাশযানে পৃথিবীতে ফিরে এসেছে। কার্গো "প্রগতি" এছাড়াও পরিবর্তন করা হয়েছে.
23 এপ্রিল, 1968-এ, 11A511 লঞ্চ ভেহিকল নতুন 7K-ওকে মহাকাশযান, সয়ুজ নামক, নিম্ন-পৃথিবী কক্ষপথে চালু করে। জাহাজটি ইউএসএসআর পাইলট-কসমোনট, সোভিয়েত ইউনিয়নের নায়ক ভ্লাদিমির কোমারভ দ্বারা চালিত হয়েছিল। ফ্লাইট চলাকালীন, নকশায় অপূর্ণতার কারণে অনেক ব্যর্থতা প্রকাশিত হয়েছিল, যার কারণে প্রোগ্রামটি কমানো হয়েছিল। এবং 24 এপ্রিল, কক্ষপথ থেকে অবতরণের সময়, একটি বিপর্যয় ঘটেছিল - অবতরণ গাড়ির পুনরুদ্ধার ব্যবস্থা ব্যর্থ হয়েছিল। এটি মাটির সাথে আঘাতে বিধ্বস্ত হয় এবং দুর্ভাগ্যবশত মহাকাশচারী মারা যায়। এটি ছিল মনুষ্যবাহী মহাকাশ ফ্লাইটের প্রথম হতাহতের ঘটনা।
নতুন স্পেসশিপের ভাগ্য এভাবেই করুণভাবে শুরু হয়েছিল।
পরবর্তীকালে, বিকাশকারী এবং পরীক্ষকদের কঠোর পরিশ্রমের মাধ্যমে, মহাকাশযান এবং এর উৎক্ষেপণ যান বারবার উন্নত করা হয়েছিল এবং উচ্চ স্তরের নির্ভরযোগ্যতায় নিয়ে আসা হয়েছিল। মহাকাশযানের নতুন পরিবর্তনগুলি তৈরি করা হয়েছে - এগুলি হল সয়ুজ টি এবং সোয়ুজ টিএম, পাশাপাশি তাদের জন্য লঞ্চ যানবাহন - সয়ুজ ইউ এবং সয়ুজ ইউ -2। সেগুলি দীর্ঘমেয়াদী অরবিটাল স্টেশন স্যালিউট এবং মির, সেইসাথে সোভিয়েত-আমেরিকান সয়ুজ-অ্যাপোলো প্রোগ্রামের প্রোগ্রামের অধীনে মনুষ্যবাহী ফ্লাইটের উদ্দেশ্যে ছিল, যার সময় একটি আন্তর্জাতিক ক্রুর প্রথম ফ্লাইট হয়েছিল। মহাকাশযান এবং উৎক্ষেপণ যান বর্তমানে আন্তর্জাতিক মহাকাশ স্টেশনকে সমর্থন করে।
আমরা সয়ুজ U-2 লঞ্চ ভেহিক্যালের অঙ্কন অফার করি, যেটি 18 মে, 1991-এ Soyuz TM-12 মহাকাশযানটিকে মীর মহাকাশ স্টেশনে ফ্লাইটে নিম্ন-পৃথিবী কক্ষপথে উৎক্ষেপণ করেছিল। আন্তর্জাতিক ক্রুদের মধ্যে ছিলেন দুই ইউএসএসআর মহাকাশচারী আনাতোলি আর্টসেবারস্কি, সের্গেই ক্রিকালেভ এবং ইংরেজ মহিলা হেলেন শারম্যান। এই রকেটটি আলেকজান্ডার লেভিখের জন্য একটি প্রোটোটাইপ হিসাবে কাজ করেছিল যাতে শিশুদের (যুব) সৃজনশীলতার মস্কো সিটি প্যালেসের রকেট এবং স্পেস মডেলিংয়ের পরীক্ষাগারে এটির একটি অনুলিপি তৈরি করা হয়েছিল এবং তাকে রাশিয়া, ইউরোপ এবং বিশ্বের চ্যাম্পিয়ন হতে সাহায্য করেছিল।
সয়ুজ লঞ্চ ভেহিকেল (LV) এর ইতিহাস 1960 সালে শুরু হয়, যখন OKB-1, রকেট এবং স্পেস সিস্টেমের প্রধান ডিজাইনার S.P. Korolev-এর নেতৃত্বে, একটি চার-পর্যায়ের লঞ্চ ভেহিকেল তৈরি করা শুরু করে, যাকে পরে মোলনিয়া বলা হয়। এই উৎক্ষেপণ বাহনটির বিস্তৃত পরিসরের কাজগুলি সমাধান করার কথা ছিল: আন্তঃগ্রহ স্টেশন চালু করা থেকে শুরু করে পৃথিবীর কাছাকাছি কক্ষপথে টেলিযোগাযোগ কৃত্রিম আর্থ স্যাটেলাইট চালু করা। এর তিন-পর্যায়ের সংস্করণ, মনোনীত 11A57, পৃথিবীর কাছাকাছি কক্ষপথে ভারী জেনিট-4 পুনরুদ্ধার উপগ্রহ উৎক্ষেপণের উদ্দেশ্যে ছিল।
RN 11A57 এর ভিত্তি ছিল বিখ্যাত রাজকীয় "সাত"। নতুন উন্নত শক্তিশালী 3য় পর্যায় - রকেট ব্লক (RB) I - এর ব্যাস ছিল 2.66 মিটার এবং শরীরের দৈর্ঘ্য 6.745 মিটার। এর ভিত্তি ছিল R-9 আন্তঃমহাদেশীয় ব্যালিস্টিক ক্ষেপণাস্ত্রের 2য় পর্যায়ের নকশা এবং ইঞ্জিন। এর ফোর-চেম্বার লিকুইড রকেট ইঞ্জিন (LPRE) RD-0110 একটি "ওপেন" ডিজাইনের 30 টন থ্রাস্ট সহ তরল অক্সিজেন এবং কেরোসিনের উপর চলত, উভয় নিম্ন স্তরের মতো, এবং এর একটি নির্দিষ্ট প্রবণতা ছিল 330 সেকেন্ড। ইঞ্জিনটি প্রধান ডিজাইনার এসএ কোসবার্গের নেতৃত্বে ভোরোনেজ ডিজাইন ব্যুরো দ্বারা তৈরি করা হয়েছিল।
ব্লক I একটি গোলাকার জ্বালানী ট্যাঙ্ক, একটি যন্ত্রের বগি, একটি অক্সিডাইজার ট্যাঙ্ক এবং একটি পুচ্ছ বগি নিয়ে গঠিত। এর নকশা বৈশিষ্ট্যগুলি উল্লেখযোগ্যভাবে ওজন হ্রাস করা সম্ভব করেছে। ইঞ্জিন, একটি ঐতিহ্যগত পাওয়ার ফ্রেম ছাড়া, অক্সিডাইজার ট্যাঙ্কের নীচে সংযুক্ত ছিল, এবং লেজের বগিটি আলাদা করা যায়। ফ্লাইট নিয়ন্ত্রণটি চারটি স্টিয়ারিং অগ্রভাগ দ্বারা পরিচালিত হয়েছিল, যার মাধ্যমে তরল-প্রোপেল্যান্ট রকেট ইঞ্জিনের টার্বোপাম্প ইউনিট থেকে নিষ্কাশন গ্যাস নির্গত হয়েছিল। 2য় এবং 3য় পর্যায়ের বিভাজন একটি "হট সার্কিট" (অর্থাৎ যখন 2য় পর্যায় ইঞ্জিন চলছিল) অনুসারে ঘটেছিল এবং 5-10 সেকেন্ডের পরে ব্লকের লেজ বিভাগটিও পুনরায় সেট করা হয়েছিল, তিনটি বিভাগে বিভক্ত। . তিন-পর্যায়ের বাহকটি 5.9 টন পর্যন্ত ওজনের একটি পেলোডকে পৃথিবীর কাছাকাছি কক্ষপথে উৎক্ষেপণ করা সম্ভব করেছিল।এর সাহায্যে, প্রথম বহু-আসন উপগ্রহ ভোসখদ এবং ভোসখড-2 উৎক্ষেপণ করা হয়েছিল। পরবর্তী ফ্লাইটের সময়, 1965 সালের মার্চ মাসে, মহাকাশচারী আলেক্সি আরখিপোভিচ লিওনভ বিশ্বের প্রথমবারের মতো মহাকাশে প্রবেশ করেছিলেন।
1963 সালের মার্চ মাসে, OKB-1 কক্ষপথে একটি সমাবেশ এবং কৌশলগত কমপ্লেক্সের একটি প্রাথমিক নকশা সম্পন্ন করেছিল, যার অন্যতম লক্ষ্য ছিল চাঁদে একটি মানবিক ফ্লাইট। কমপ্লেক্সের মধ্যে রয়েছে: একটি 7K মহাকাশযান, কক্ষপথে জ্বালানি দেওয়া হয় নভোযান 9K এবং রিফুয়েলিং ট্যাঙ্কার 11K। তাদেরকে পৃথিবীর কাছাকাছি কক্ষপথে পাঠানোর জন্য, LV 11A57 এর ভিত্তিতে একটি নতুন ক্যারিয়ার 11A511 তৈরি করার পরিকল্পনা করা হয়েছিল। পরবর্তীকালে, কমপ্লেক্সের বিন্যাসটি বারবার পরিবর্তিত হয় এবং অবশেষে আধুনিক একটিতে রূপান্তরিত হয়, যার মধ্যে একটি অরবিটাল স্টেশন, একটি মনুষ্যবাহী ("সয়ুজ") এবং একটি পরিবহন ("প্রগতি") মহাকাশযান রয়েছে।
মনুষ্যবাহী মহাকাশযান 7K-OK তিনটি অংশ নিয়ে গঠিত। সামনে একটি ডকিং স্টেশন এবং একটি ট্রানজিশন হ্যাচ সহ একটি সার্ভিস কম্পার্টমেন্ট (BO) ছিল। এর পিছনে রয়েছে ডিসেন্ট ভেহিকল (DS), যা মহাকাশচারী কেবিন হিসাবে কাজ করে। এর পরে রয়েছে ইন্সট্রুমেন্টেশন এবং অ্যাসেম্বলি কম্পার্টমেন্ট, যেখানে কন্ট্রোল ডিভাইস, ফুয়েল ট্যাঙ্ক এবং জাহাজের একটি সংশোধনমূলক প্রপালশন সিস্টেম রয়েছে, যা মাটিতে নামার সময় ফ্লাইট পাথ, মুরিং এবং ব্রেকিং পরিবর্তন করার জন্য ডিজাইন করা হয়েছে। জাহাজটির লঞ্চের ওজন ছিল 6.46 থেকে 6.56 টন।
লঞ্চ ভেহিকেল 11A511 (11A57 এর তুলনায়) পেলোডের ভর বাড়িয়ে 6.5 টন করে এবং জরুরি উদ্ধার ব্যবস্থা পরিবর্তন করা হয়েছিল। এটি করার জন্য, রকেটটি নিরক্ষীয় সমতলের দিকে 51.5 ডিগ্রী প্রবণতার সাথে চালু করা হয়েছিল, 150 কেজি পর্যন্ত হালকা একটি টেলিমেজারমেন্ট সিস্টেম ব্যবহার করা হয়েছিল এবং স্থলভাগে কমপক্ষে 252 সেকেন্ড এবং 315 সেকেন্ডের একটি নির্দিষ্ট প্রবণতা সহ কেন্দ্রীয় ব্লকগুলির জন্য ইঞ্জিনগুলি ব্যবহার করা হয়েছিল। শূন্যে স্বতন্ত্রভাবে নির্বাচিত হয়. ক্যারিয়ারের কাঠামোগত পরিবর্তনগুলি ন্যূনতম ছিল - পেলোড সহ 3য় পর্যায়ের (ব্লক I) ডকিং স্টেশন এবং নাক ফেয়ারিং (GO) এর আকার পরিবর্তন করা হয়েছিল।
11A511 লঞ্চ ভেহিকেল 1ম এবং 2য় পর্যায়ের রকেট ব্লকের একটি প্যাকেজ নিয়ে গঠিত, 3য় পর্যায় (ব্লক I) এবং 7K-ওকে মহাকাশযান, একটি হেড ফেয়ারিং দ্বারা সক্রিয় বিভাগে বন্ধ, যার উপরে প্রপালশন সিস্টেম জরুরী উদ্ধার ব্যবস্থা অবস্থিত ছিল (ঢাবি এসএএস)। লঞ্চ গাড়ির দৈর্ঘ্য ছিল 49.913 মিটার, লঞ্চের ওজন ছিল 309 টন। এরোডাইনামিক কন্ট্রোল সারফেসের স্প্যান ছিল 10.412 মিটার।
কক্ষপথে মহাকাশযান উৎক্ষেপণের সময় ক্রুদের উদ্ধার করার উদ্দেশ্যে এসএএসের উদ্দেশ্য ছিল। ফ্লাইটের প্রথম পর্বের সময়, উৎক্ষেপণের মুহূর্ত থেকে SAS এবং GO কন্ট্রোল সিস্টেমের মুক্তি পর্যন্ত, বিচ্ছিন্নযোগ্য রিএন্ট্রি ইউনিট (RNU) জরুরী ক্ষেপণাস্ত্র থেকে সরানো হয়। এর মধ্যে রয়েছে DU SAS এবং উপরের অংশহেড ফেয়ারিং, যার ভিতরে জাহাজের প্রত্যাহারযোগ্য অংশ (BO এবং SA) অবস্থিত। চারটি জালির স্টেবিলাইজার ফেয়ারিংয়ে মাউন্ট করা হয়, যা মূল অংশটি আলাদা হয়ে গেলে খোলে। যখন লঞ্চ গাড়িটি লঞ্চ কমপ্লেক্সে থাকে তখন SAS এর সক্রিয়করণ লঞ্চ কন্ট্রোল পয়েন্ট থেকে এবং ফ্লাইটের সময় স্বয়ংক্রিয়ভাবে কমান্ডের ভিত্তিতে পরিচালিত হয়। প্রথম বিভাগে, এসএএস নিম্নলিখিতভাবে কাজ করে: যখন একটি কমান্ড দেওয়া হয়, তখন এসএএসকে যন্ত্র-সমাবেশের বগি থেকে আলাদা করা হয় এবং গতিশীল ফেয়ারিংয়ের উপরের অংশটি, ল্যাটিস স্টেবিলাইজার কনসোলগুলির লকগুলি খোলা হয়, যা এরোডাইনামিক স্থিতিশীলতা নিশ্চিত করে। ফ্লাইটের, তারপর SAS রিমোট কন্ট্রোলের প্রধান ইঞ্জিনটি ফায়ার করা হয়, যা ওজিবিকে নিরাপদ স্থানে নিয়ে যায়। দূরত্ব (প্রায় 1 কিমি)। সেখানে SA কে OGB থেকে আলাদা করা হয় এবং এর প্যারাসুট সিস্টেম চালু করা হয়।
এসএএস প্রপালশন সিস্টেম হল তিনটি সলিড প্রপেলান্ট রকেট মোটর (সলিড প্রপেলান্ট রকেট মোটর) এর সংমিশ্রণ: প্রধান ইঞ্জিন, একটি ডিফ্লেকশন ইঞ্জিন, যা নাক ফেয়ারিং থেকে স্বাভাবিক বিচ্ছিন্নতার মুহুর্তে এসএএস প্রপালশন সিস্টেমকে লঞ্চ যান থেকে দূরে সরিয়ে দেয়, এবং একটি ডিক্লিনেশন ইঞ্জিন, SAS প্রপালশন সিস্টেমকে LV ফ্লাইটের দিক থেকে দূরে সরিয়ে দেওয়ার জন্য ডিজাইন করা হয়েছে।
সয়ুজ মহাকাশযানের ফ্লাইট পরীক্ষা 28 নভেম্বর, 1966 তারিখে শুরু হয়েছিল। প্রোগ্রামটি 1971 সালের শেষের দিকে শেষ হয়েছিল। এই সময়ের মধ্যে, 19টি উৎক্ষেপণ হয়েছিল (যার মধ্যে একটি ব্যর্থ হয়েছিল)। ঐতিহ্য অনুসারে, জাহাজের নাম লঞ্চ গাড়িতে স্থানান্তরিত হয়েছিল।

1 - জরুরী রেসকিউ সিস্টেমের প্রপালশন সিস্টেম; 2-মাথা ফেয়ারিং; 3 - জালি স্টেবিলাইজার; 4 - অ্যাডাপ্টার; 5 - জ্বালানী ট্যাংক ব্লক I; 6.24 - অ্যান্টেনা; 7 - ব্লক I এর অক্সিডাইজার ট্যাঙ্ক; 8 - ব্লক I এর জেটিসনযোগ্য লেজ বিভাগ; 9 - অ্যাডাপ্টার ট্রাস; 10 - ব্লক এল এর উপকরণ বগি; 11 - ব্লক এল এর অক্সিডাইজার ট্যাঙ্ক; 12 - বন্ধনী; 13 - শক্তি শঙ্কু; 14 - সাইড ব্লক অক্সিডাইজার ট্যাংক; 15 - জ্বালানী ট্যাংক ব্লক A; 16 - পার্শ্ব ব্লক জ্বালানী ট্যাংক; 17 - টাই রড; 18 - ব্লক এল এর লেজ বিভাগ; 19-টেইল সাইড ব্লক বগি; 20 - এরোডাইনামিক স্টিয়ারিং হুইল; 21 - RD-108 ইঞ্জিন; 22 - RD-107 ইঞ্জিন; 23 - RD-0110 ইঞ্জিন; XVI - rivet seam (একটি countersunk মাথা সঙ্গে rivets); XVII- rivet seam (একটি অর্ধগোলাকার মাথা সঙ্গে rivets); XVIII - স্পট ঢালাই seam; XIX - জোড়

1969 সালের দ্বিতীয়ার্ধে, একটি দীর্ঘমেয়াদী অরবিটাল স্টেশন DOS-7K (পরে Salyut বলা হয়) তৈরির কাজের বিকাশের সাথে সম্পর্কিত, 7K-T মনোনীত সয়ুজ পরিবহন জাহাজের বিকাশ শুরু হয়েছিল। এর লঞ্চ ওজন 6.7 টন বৃদ্ধি করা হয়েছিল।জাহাজের এই সংস্করণের মনুষ্যবিহীন লঞ্চগুলি চালানো হয়নি। ফ্লাইট ডিজাইন টেস্টিং স্টেজটি স্যালিউট ডস-এর অংশ হিসাবে জাহাজের অপারেশন শুরুর সাথে একত্রিত হয়েছিল। প্রথম ফ্লাইটটি 23-25 এপ্রিল, 1971 সালে হয়েছিল (সয়ুজ-10 মহাকাশযান), দ্বিতীয় ফ্লাইটটি হয়েছিল একই বছরের 6-30 জুলাই (সয়ুজ-11 মহাকাশযান, ক্রু: পাইলট-কসমোনটস জর্জি ডোব্রোভলস্কি, ভ্লাদিস্লাভ ভলকভ এবং ভিক্টর পাটসায়েভ)। অবতরণের সময়, বগিগুলি পৃথক করার মুহুর্তে, জাহাজটি চাপে পড়ে, যার ফলে ক্রুদের মৃত্যু হয়। বিপর্যয়ের জন্য জাহাজের নকশায় অনেক পরিবর্তন আনার প্রয়োজন ছিল, প্রাথমিকভাবে মহাকাশচারীদের উদ্ধারের উপায়ে (লাইফ সাপোর্ট সিস্টেম সহ ফ্লাইট স্যুট)। এটি দুইজন ক্রু কমিয়েছে এবং জাহাজের লঞ্চ ওজন 6.8 টন বাড়িয়েছে।
70 এর দশকের শুরু থেকে, সয়ুজ মহাকাশযানের পরবর্তী পরিবর্তনের কাজ শুরু হয়েছিল, যা তিনজনের ক্রুকে ফেরত দেওয়া উচিত ছিল। এর জন্য উপাধি 7K-ST গৃহীত হয়েছিল, এবং পরে নাম "Soyuz T"। জাহাজের লঞ্চের ওজন বেড়ে 6.83 টন হয়েছে। এর জন্য প্রধান ডিজাইনার ডিআই কোজলভের নেতৃত্বে সামারা ডিজাইন ব্যুরো "প্রগ্রেস"-এ লঞ্চ যানবাহনগুলির আরও উন্নতি এবং একীকরণের কাজ চালিয়ে যাওয়ার প্রয়োজন ছিল, যা একটি ইউনিফাইড তৈরিতে পরিণত হয়েছিল। লঞ্চ যান "Soyuz U" (সূচী 11A511U), যা আজও ব্যবহার করা হচ্ছে। একটি নতুন ক্যারিয়ার তৈরির ফলে ক্ষেপণাস্ত্র ইউনিটগুলির পরিসর উল্লেখযোগ্যভাবে হ্রাস করা সম্ভব হয়েছিল।
1972 সালে, আন্তর্জাতিক সয়ুজ-অ্যাপোলো স্পেস প্রোগ্রাম (ASTP প্রোগ্রাম) বাস্তবায়নের কাজ শুরু হয়। এর জন্য সয়ুজ মহাকাশযানের একটি পরিবর্তন তৈরি করা হয়েছিল, মনোনীত 7K-M। কক্ষপথে উৎক্ষেপণের জন্য, নতুন SAS প্রপালশন সিস্টেম সহ Soyuz U লঞ্চ ভেহিকেল ব্যবহার করার সিদ্ধান্ত নেওয়া হয়েছিল। SAS কন্ট্রোল সিস্টেম ড্রপ করার মুহূর্ত থেকে GO নামানোর মুহূর্ত থেকে ক্রুদের উদ্ধার ফেয়ারিংয়ের অধীনে চারটি কঠিন প্রপেলান্ট রকেট মোটর ইনস্টল করে নিশ্চিত করা হয়েছিল। নতুন ক্যারিয়ারের সাথে 7K-M মহাকাশযানের পরীক্ষাগুলি 3 এপ্রিল, 1974-এ স্বয়ংক্রিয় মোডে একটি ফ্লাইটের মাধ্যমে শুরু হয়েছিল এবং একই বছরে 2 থেকে 8 ডিসেম্বর পর্যন্ত Soyuz-16 মহাকাশযানের ফ্লাইটের মাধ্যমে শেষ হয়েছিল। এবং 15 জুলাই, 1975 সালে, Soyue-19 চালু হয়, যা 17 জুলাই সফলভাবে আমেরিকান অ্যাপোলোর সাথে ডক করে।
7K-ST মহাকাশযানের ফ্লাইট ডিজাইন পরীক্ষা, যা 6 আগস্ট, 1974 সালে শুরু হয়েছিল, 27 নভেম্বর থেকে 10 ডিসেম্বর, 1989 পর্যন্ত সয়ুজ টি-3 মহাকাশযানের মনুষ্যবাহী ফ্লাইট দ্বারা সম্পন্ন হয়েছিল। সয়ুজ টি সিরিজের জাহাজগুলি এর অংশ হিসাবে পরিচালিত হয়েছিল Salyut-3 অরবিটাল স্টেশন। 6, Salyut 7 এবং মীর মার্চ 1981 থেকে জুলাই 1986 পর্যন্ত। এই সময়কালে 13টি মনুষ্যবাহী লঞ্চ ছিল। 1983 সালের সেপ্টেম্বরে Soyuz T-এর লঞ্চের সময়, RN 11A511U লঞ্চ কমপ্লেক্সে বিধ্বস্ত হয় এবং SAS ক্রুদের উদ্ধার নিশ্চিত করে।
Soyuz T মহাকাশযানের আরও আধুনিকীকরণের ফলে আরেকটি পরিবর্তন 7K-STM (Soyuz TM), যার উৎক্ষেপণ ভর 7.07 টনে পৌঁছেছে। এটি অরবিটাল স্টেশনগুলির উন্নতির কারণে এবং বিশেষ করে, এই সত্যের কারণে যে তাদের জন্য কক্ষপথের প্রবণতা 65 ডিগ্রীতে বাড়ানোর সুযোগ দেওয়া হয়েছিল। লঞ্চ গাড়ির 330-350 কেজি কার্গোর ক্ষতির জন্য ক্ষতিপূরণ করা প্রয়োজন হয়ে পড়ে। সমস্যাটি শুধুমাত্র সম্মিলিত উপায়ে সমাধান করা যেতে পারে: প্রথমত, লঞ্চ যানের ক্ষমতা বৃদ্ধি করে এবং দ্বিতীয়ত, জাহাজের ভর কমিয়ে।
1984 সালে, Soyuz U লঞ্চ ভেহিকেল উন্নত করার কাজ সম্পন্ন হয়। আপগ্রেড করা রকেটটির নাম ছিল সয়ুজ U-2 (সূচক 11A511U-2)। এর প্রধান পার্থক্য ছিল কেন্দ্রীয় ব্লকে কেরোসিনের পরিবর্তে সিন্থেটিক হাইড্রোকার্বন জ্বালানি "সাইক্লিন" ব্যবহার করা। এর ব্যবহার আরও সম্পূর্ণ জ্বালানী দহন অর্জন করা এবং কেন্দ্রীয় ব্লক ইঞ্জিনের নির্দিষ্ট আবেগকে 2-3 সেকেন্ড দ্বারা বৃদ্ধি করা সম্ভব করেছে। এটি, নিয়ন্ত্রণ সরঞ্জামের আধুনিকীকরণ এবং ওজন হ্রাসের সাথে সম্পর্কিত কিছু অন্যান্য উন্নতির সাথে, পেলোডের ওজনকে প্রয়োজনীয় মান পর্যন্ত বাড়ানো সম্ভব করেছে।
পাশের ব্লকগুলিতে বর্ধিত তাপীয় প্রভাব আমাদের তাদের উপর তাপ সুরক্ষার আকার বাড়াতে বাধ্য করেছে। Soyuz TM মহাকাশযানের জন্য, একটি নতুন SAS কন্ট্রোল ইউনিট তৈরি করা হয়েছিল, যার ব্যাস কম ছিল, যা SAS কন্ট্রোল ইউনিটের এরোডাইনামিক বৈশিষ্ট্যগুলিকে উন্নত করেছে এবং ব্যালেন্সিং লোডের ভরকে কমিয়েছে। হেড ফেয়ারিংয়ের উপরের অংশের বাইরের পৃষ্ঠটি SAS কন্ট্রোল অগ্রভাগ থেকে প্রবাহিত জেট স্ট্রিমের প্রভাব থেকে রক্ষা করার জন্য তাপ নিরোধক দ্বারা আবৃত ছিল। SAS কন্ট্রোল সিস্টেমের মুক্তির সময় ফ্লাইটের 160 তম থেকে 115 তম সেকেন্ডে পরিবর্তন করা গুরুত্বপূর্ণ, যা পেলোড বাড়ানো এবং পাশের ব্লকগুলির সাথে এর পতনের ক্ষেত্রগুলিকে একত্রিত করা সম্ভব করেছিল। মনুষ্যবিহীন মোডে সয়ুজ টিএম মহাকাশযানের ফ্লাইট পরীক্ষা 21 মে, 1986-এ শুরু হয়েছিল এবং 17 ফেব্রুয়ারি, 1987-এ মনুষ্যবাহী ফ্লাইটগুলি শুরু হয়েছিল।
Soyuz U-2 লঞ্চ ভেহিকেল 11S59-2 রকেট ব্লকের একটি প্যাকেজ নিয়ে গঠিত, যা ২য় পর্যায়ের ব্লক A এবং ১ম পর্যায়ের B, C, D এবং D ব্লক দ্বারা গঠিত; 3য় পর্যায় (রকেট ব্লক I 11S510) এবং সমাবেশ এবং প্রতিরক্ষামূলক ব্লক 11S517AZ, SAS কন্ট্রোল সিস্টেম, হেড ফেয়ারিং এবং ট্রানজিশন কম্পার্টমেন্ট নিয়ে গঠিত। সয়ুজ টিএম মহাকাশযানটি স্থানান্তর বগিতে মাউন্ট করা হয়েছে। এটি একটি সমাবেশ এবং প্রতিরক্ষামূলক ব্লক দিয়ে উপরে থেকে বন্ধ করা হয়। সয়ুজ টিএম মহাকাশযানের সাথে ক্যারিয়ারের দৈর্ঘ্য 51.316 মিটার, এরোডাইনামিক কন্ট্রোল সারফেসগুলির স্প্যান 10.303 মিটার, লঞ্চের ওজন 310 টন।
সন্নিবেশ সাইক্লোগ্রামটি নিম্নরূপ: আরোহণ যোগাযোগ - 0 s, SAS রিমোট কন্ট্রোল রিসেট - 115 s, 1ম পর্যায় ব্লকগুলির বিচ্ছেদ - 118 s, গতিশীল ফেয়ারিং রিসেট - 166 s, কেন্দ্রীয় ব্লক বিচ্ছেদ - 297- I থেকে, টেল সেকশন ডাম্পিং RB I - 305th s, মহাকাশযান বিভাগ - 541th s.
বর্তমানে, সয়ুজ U-2 লঞ্চ ভেহিকেল ব্যবহার করা হয় না, যেহেতু সিন্থেটিক জ্বালানি অত্যন্ত ব্যয়বহুল, এবং সয়ুজ টিএম মহাকাশযানটিকে 51.5 ডিগ্রির প্রবণতা সহ কক্ষপথে চালু করার কাজটি Soyuz U লঞ্চ যান ব্যবহার করে সমাধান করা যেতে পারে। এটি 11S59 প্যাকেজ এবং Soyuz U-2 এর মতো উপরের ব্লকগুলি নিয়ে গঠিত। Soyuz U লঞ্চ ভেহিকলের মাত্রা - Soyuz TM মহাকাশযান কমপ্লেক্স Soyuz U-2 লঞ্চ ভেহিকেলের মতই, এবং লঞ্চের ওজন হল 309.7 টন।
বর্তমানে, Rus প্রোগ্রামের অধীনে সয়ুজ লঞ্চ ভেহিকেলকে আরও আধুনিক করার কাজ চলছে। এর কাজটি হল প্লেসেটস্ক কসমোড্রোম থেকে মনুষ্যবাহী ফ্লাইট পরিচালনার জন্য লঞ্চ গাড়ির শক্তি ক্ষমতা বাড়ানো। প্রোগ্রামটি বেশ কয়েকটি ধাপ নিয়ে গঠিত। প্রথমটিতে একটি অন-বোর্ড কম্পিউটার থেকে একটি ডিজিটাল দিয়ে পুরানো অ্যানালগ নিয়ন্ত্রণ ব্যবস্থা প্রতিস্থাপন করা জড়িত। এটি নিয়ন্ত্রণ সরঞ্জামের ওজন হ্রাস করবে এবং এর নির্ভরযোগ্যতা বাড়াবে।
দ্বিতীয় পর্যায়ে, কেন্দ্রীয় এবং পার্শ্ব ক্ষেপণাস্ত্র ইউনিটগুলির RD-107 এবং RD-108 প্রধান রকেট ইঞ্জিনগুলিকে আধুনিকীকরণ করার পরিকল্পনা করা হয়েছে। বিশেষত, দহন চেম্বারে, 650টি সেন্ট্রিফিউগাল অগ্রভাগের সাথে একটি পুরানো নকশার মাথাটি একটি নতুন দিয়ে প্রতিস্থাপন করুন, 1000টি জেট অগ্রভাগ সহ। এই প্রতিস্থাপন ইঞ্জিনগুলির দহন চেম্বারে জ্বালানী উপাদানগুলির মিশ্রণ এবং দহনের প্রক্রিয়াগুলিকে উন্নত করবে, যা ফলস্বরূপ, চাপের স্পন্দন হ্রাস করবে এবং বিভিন্ন ইউনিট দ্বারা নির্দিষ্ট থ্রাস্ট বৃদ্ধি করবে। আধুনিকীকৃত ইঞ্জিনগুলির নাম হল RD-107A এবং RD-108A, এবং LV পরিবর্তনগুলি হল "Soyuz FG"।
তৃতীয় পর্যায়ে একটি উন্নত রকেট ইউনিট তৈরি করা এবং এর জ্যামিতিক মাত্রা বজায় রাখা জড়িত। পরিবর্তনটি একটি "বন্ধ" সার্কিটের নতুন তরল প্রপেলান্ট রকেট ইঞ্জিন RD-0124 এর উপর ভিত্তি করে করা হবে। এটির ব্যবহার এবং উন্নত দহন প্রক্রিয়া, জ্বালানী এবং অক্সিডাইজারের অনুপাত পরিবর্তন করে অর্জিত, RD-0110 ইঞ্জিনের মৌলিক সংস্করণের তুলনায় 33 সেকেন্ড দ্বারা নির্দিষ্ট আবেগ বৃদ্ধি করবে। উপাদানগুলির অনুপাত পরিবর্তনের ফলে জ্বালানী ট্যাঙ্কের পরিমাণ হ্রাস পাবে, যার নীচের অংশটি লেন্টিকুলার হয়ে যাবে। সমস্ত পরিকল্পিত পরিবর্তন সহ লঞ্চ ভেহিকেলটির নাম ছিল সয়ুজ-২। এটি প্লেসেটস্ক কসমোড্রোম থেকে মনুষ্যবাহী মহাকাশযান উৎক্ষেপণের অনুমতি দেবে। অদূর ভবিষ্যতে এর ফ্লাইট পরীক্ষা শুরু হওয়া উচিত।
রুশ প্রোগ্রামের চতুর্থ পর্যায়ে সয়ুজ লঞ্চ গাড়ির একটি গভীর পরিবর্তন জড়িত। এটি আরও উচ্চতর শক্তির ক্ষমতা সহ একটি প্রায় নতুন লঞ্চ যান তৈরি হবে, যার প্রকল্পটির নাম ইতিমধ্যেই "অরোরা" রাখা হয়েছে৷ এটি 150 টন থ্রাস্ট সহ একটি শক্তিশালী লিকুইড-প্রপেলান্ট রকেট ইঞ্জিন NK-33 এর কেন্দ্রীয় ব্লকে ব্যবহারের উপর ভিত্তি করে, যা 30 বছর আগে N-1 চন্দ্রের জন্য প্রধান ডিজাইনার এনডি কুজনেটসভের নেতৃত্বে ডিজাইন ব্যুরোতে তৈরি করা হয়েছিল। লঞ্চ যান। এর ব্যবহারের জন্য পর্যায়গুলির মধ্যে জ্বালানী পুনর্বন্টন প্রয়োজন হবে। সেন্ট্রাল ব্লক ফুয়েল ট্যাঙ্কের ব্যাস 0.61 মিটার বৃদ্ধি পাবে বলে আশা করা হচ্ছে তাদের দৈর্ঘ্য বজায় রেখে। পাশের ব্লকগুলি অপরিবর্তিত থাকবে। এটি ন্যূনতম পরিবর্তন সহ S7 এর উপর ভিত্তি করে বিদ্যমান LV লঞ্চ কমপ্লেক্সের নকশা ব্যবহার করা সম্ভব করবে। 3 য় পর্যায়ের জন্য একটি নতুন নকশা তৈরি করা প্রয়োজন, যার ব্যাস 3.5 মিটারে বৃদ্ধি পাবে।
নতুন লঞ্চ ভেহিকেলের তিন-পর্যায়ের সংস্করণটি বাইকোনুর কসমোড্রোম থেকে উৎক্ষেপণের সময় 10.6 টন ওজনের একটি পেলোড কম কক্ষপথে উৎক্ষেপণ করতে সক্ষম হবে। এবং চার-পর্যায়ের সংস্করণে, কর্ভেট উপরের স্তরের সাথে, এটি চালু করা যেতে পারে ভূ - সমলয় কক্ষপথ 1.6 টন পেলোড। গত বছর, কৌরো কসমোড্রোমে (ফরাসি গায়ানা) G7 ভিত্তিক লঞ্চ যানবাহনের জন্য একটি লঞ্চ কমপ্লেক্স নির্মাণের বিষয়ে রাশিয়া এবং ফ্রান্সের মধ্যে একটি আন্তঃসরকারি চুক্তি স্বাক্ষরিত হয়েছিল। ভারত মহাসাগরে অবস্থিত ক্রিসমাস দ্বীপে একটি মহাকাশবন্দর নির্মাণের প্রকল্পও রয়েছে। কোনো প্রকল্প বাস্তবায়িত হলে, নতুন লঞ্চ ভেহিকেল 12 টন ওজনের কার্গো কম কক্ষপথে এবং 2.1 টন জিওস্টেশনারি কক্ষপথে পাঠাতে সক্ষম হবে।
ভি. মিনাকোভ, প্রকৌশলী
একটি ভুল লক্ষ্য করেছেন? এটি নির্বাচন করুন এবং ক্লিক করুন Ctrl+Enter আমাদের জানাতে
স্টেশনের সাথে ডক করতে ব্যর্থতা: Soyuz-10, Soyuz-15, Soyuz-23, Soyuz-25, Soyuz T-8।
Soyuz-33 ডকিংয়ের আগে ইঞ্জিন বিস্ফোরণ।
সয়ুজ মহাকাশযান 130 টিরও বেশি সফল মনুষ্যবাহী ফ্লাইট করেছে (যানবাহনের তালিকা দেখুন) এবং সোভিয়েত এবং রাশিয়ান মনুষ্যবাহী মহাকাশ অনুসন্ধান কর্মসূচির একটি মূল উপাদান হয়ে উঠেছে। 2011 সালে স্পেস শাটল ফ্লাইটগুলি শেষ হওয়ার পরে, আন্তর্জাতিক মহাকাশ স্টেশনে ক্রুদের পৌঁছে দেওয়ার একমাত্র উপায় সয়ুজ ছিল।
সৃষ্টির ইতিহাস
একটি সম্পর্কিত চন্দ্র অবতরণ প্রকল্পকে বলা হয় L3। দুটি জাহাজের সংমিশ্রণ এটির জন্য ডিজাইন করা হয়েছিল: 7K-LOK চন্দ্র অরবিটাল জাহাজ এবং এলকে ল্যান্ডিং জাহাজ। একটি বিশেষভাবে তৈরি N-1 রকেট দ্বারা চাঁদে বিতরণ, যার নকশাটি মঙ্গল গ্রহে মানুষের ফ্লাইটের জন্য OKB-1 এ অধ্যয়ন করা হয়েছিল। 7K-LOK জাহাজের তিনটি বগির একটি ডায়াগ্রাম তৈরি করা হয়েছিল, যা তখন পুনরাবৃত্তি হয়েছিল। জাহাজের প্রপালশন সিস্টেম হাইড্রোজেন পারক্সাইড দ্বারা চালিত ছিল, যার জন্য ট্যাঙ্কগুলি জাহাজের আয়তনের ভিতরে স্থাপন করা হয়েছিল। বিদ্যুৎ সরবরাহ - জ্বালানী কোষ। চাঁদে ফ্লাইট প্রোগ্রাম বন্ধ করার পরে, জাহাজের বিকাশ স্বয়ংক্রিয় লুনোখোড স্টেশনগুলির জন্য ব্যবহৃত হয়েছিল। চন্দ্র জাহাজ প্রকল্পের উপর ভিত্তি করে, তারা 7K-ওকে তৈরি করেছে - একটি তিন-সিটের অরবিটাল জাহাজ যা নিম্ন-পৃথিবী কক্ষপথে কৌশল অনুশীলন করার জন্য এবং মহাকাশচারীদের মহাকাশ থেকে জাহাজে স্থানান্তরের সাথে ডকিং করে। জাহাজটি জ্বালানী কোষের পরিবর্তে সৌর প্যানেল পেয়েছে। 7K-ওকে পরীক্ষাগুলি 1966 সালে তাড়াহুড়োতে শুরু হয়েছিল, কারণ ভোসখড মহাকাশযানে ফ্লাইট বন্ধ হয়ে যাওয়ার পরে এবং তাদের ব্যাকলগ ধ্বংস হওয়ার পরে, নতুন জাহাজের ডিজাইনাররা মহাকাশে প্রযুক্তিগত সমাধান পরীক্ষা করার সুযোগ হারিয়েছিল। ইউএসএসআর-এ মনুষ্যবাহী উৎক্ষেপণে দুই বছরের বিরতি ছিল, যে সময়ে মার্কিন যুক্তরাষ্ট্র মহাকাশ অন্বেষণ করেছিল। 7K-OK জাহাজের প্রথম তিনটি মনুষ্যবিহীন লঞ্চ: সম্পূর্ণ বা আংশিকভাবে ব্যর্থ হয়েছে। জাহাজের নকশায় ত্রুটি ধরা পড়ে। যাইহোক, কখনই সফলভাবে পরীক্ষিত মহাকাশযানের চতুর্থ এবং পঞ্চম উৎক্ষেপণগুলি মানবিক করার উদ্দেশ্যে ছিল:
পুনরায় ডিজাইন করা প্রকল্পটি সূচক 7K-T পেয়েছে: লাইফ সাপোর্ট সিস্টেমের ক্রমবর্ধমান ভরের কারণে, জাহাজটি একটি দুই আসনবিশিষ্ট হয়ে উঠেছে - কিন্তু ক্রুদের স্পেসসুটে রাখা হয়েছিল; জাহাজটি তার সৌর প্যানেল হারিয়েছে - স্টেশনে ফ্লাইটের মাত্র 2 দিনের রিজার্ভ সহ বিদ্যুৎ সরবরাহ ব্যাটারির মধ্যে সীমাবদ্ধ ছিল। প্রকল্পটি 1970-এর দশকে সোভিয়েত মহাজাগতিক বিজ্ঞানের ভিত্তি হয়ে ওঠে: সাল্যুত এবং আলমাজ স্টেশনে 29টি অভিযান এবং এর ভিত্তিতে প্রোগ্রেস কার্গো জাহাজ তৈরি করা হয়েছিল। একটি নতুন ডকিং পোর্ট APAS-75 সহ ASTP প্রোগ্রামের অধীনে আমেরিকান অ্যাপোলোর সাথে যৌথ ফ্লাইটের জন্য 7K-TM মহাকাশযানের পরিবর্তিত নকশা (M - পরিবর্তিত) আধুনিক চেহারা, ডকিং উভয় পক্ষের জন্য প্রতিসম. 7K-T প্রকল্পের চারটি মনুষ্যবাহী মহাকাশযানে এখনও বিভিন্ন সোলার প্যানেল ছিল: Soyuz-13 - 7K-T-AF ডকিং হাব ছাড়াই, Soyuz-16 এবং Soyuz-19 (7K-TM), Soyuz-22 "- অতিরিক্ত জাহাজ EPAS 7K-MF6, একটি একক ফ্লাইটের জন্য ডকিং পোর্ট ছাড়াই ব্যবহৃত হয়। "ডিজিটালাইজেশন" ছাড়াও, সয়ুজ টিএমএ-এর উন্নতিগুলি 1990-এর দশকের শেষের দিকে বিকশিত 1990-এর জাহাজের আধুনিকীকরণের তুলনায় খুব বেশি নয় - সয়ুজ টিএমএম এবং এর সরলীকরণ সয়ুজ টিএমএস, যা বিশেষত, তাদের অবতরণ স্থানান্তরিত করে। কাজাখস্তান থেকে রাশিয়া পর্যন্ত এলাকা। স্পষ্টতই, ফেডারেশন জাহাজে স্থানান্তরের আগে প্রকল্পের শেষ উন্নতি হবে সয়ুজ এমএস, যা প্রথম 7 জুলাই, 2016-এ আইএসএস-এ ক্রুদের সরবরাহ করেছিল। 2020 পর্যন্ত বেশ কয়েকটি ফ্লাইটের অর্ডারের জন্য অর্থ প্রদান করা হয়েছে। ট্র্যাফিক এবং নেভিগেশন নিয়ন্ত্রণ ব্যবস্থা, পাওয়ার সাপ্লাই সিস্টেম উন্নত করা হয়েছে, সৌর প্যানেলের এলাকা এবং শক্তি বৃদ্ধি করা হয়েছে, একটি নতুন টেলিভিশন সিস্টেম, একটি অন-বোর্ড পরিমাপ ব্যবস্থা, একটি যোগাযোগ এবং দিকনির্দেশ অনুসন্ধান ব্যবস্থা। জাহাজের সয়ুজ পরিবারের বিকাশকারী এবং নির্মাতা এনার্জিয়া রকেট এবং স্পেস কর্পোরেশন রয়ে গেছে। কোরোলেভ শহরের প্রধান প্ল্যান্টে উত্পাদন, পরীক্ষা এবং প্রাক-ফ্লাইট প্রস্তুতি - বাইকোনুর কসমোড্রোমের 254 সাইটে কর্পোরেশনের ইনস্টলেশন এবং টেস্টিং বিল্ডিং (এমআইসি) এ। যন্ত্র
|





